5.8 KiB
RT-Thread Introduction
As a beginner of Real-time Operating Systems (RTOS), you might be new to RT-Thread. However, with a better understanding of it over time, you will gradually discover the charm of RT-Thread and its advantages over other RTOSs of the same type. RT-Thread is an RTOS. With over 16 years of experience accumulated, along with the rise of the Internet of Things (IoT), it is evolving into a powerful, component-rich IoT operating system.
RT-Thread Overview
RT-Thread, short for Real Time-Thread, is an embedded real-time multi-threaded operating system. One of its main purposes is to support multi-tasking. Allowing multiple tasks to run simultaneously does not mean that the processor actually performs multiple tasks at the same time - a processor core can only run one task at a time. Every task is executed quickly, and through the task scheduler which determines the sequence according to priority, the tasks are switched rapidly, giving the illusion that multiple tasks are running at the same time. In the RT-Thread system, tasks are implemented by threads, and scheduled by the task scheduler.
RT-Thread is mainly written in the C programming language, making it easy to understand and port. It applies object-oriented programming methods to real-time system design, making the code elegant, structured, modular, and very customizable. RT-Thread comes in a few varieties - the NANO version is a minimal kernel that requires only 3KB of flash and 1.2KB of RAM, which can be tailored with easy-to-use tools. For resource-rich IoT devices, RT-Thread can use an online software package management tool, together with system configuration tools, to achieve an intuitive and rapid modular design, while being able to seamlessly import rich software featurepacks. Through this, complex functions like Android's graphical interface, touch sliding effects, smart voice control and more can be easily created.
Compared with the Linux operating system, RT-Thread is small in size, low in cost, low in power consumption and fast in startup. In addition, RT-Thread is highly responsible, with low resource usage, which is ideally suitable for various resource constraints such as cost, power consumption, etc. Although the 32-bit MCU is its main operating platform, other CPUs, such as ones with MMU, ones based on ARM9, ARM11 and even the Cortex-A series CPUs are suitable for RT-Thread in specific applications.
License Agreement
The RT-Thread system is a completely open source system, the 3.1.0 version and its earlier versions follow the GPL V2 + open source license agreement. Versions from the 3.1.0 version onwards follow the Apache License 2.0 open source license agreement. The RT-Thread system can be used free of charge in commercial products and does not require opening private code up to the public.
RT-Thread Frame
In recent years, the concept of the Internet of Things has become widely known, and the IoT market has developed rapidly. The networking of embedded devices is the trend of the times. Terminal networking has greatly increased the complexity of software, and traditional RTOS kernels can hardly meet the needs of the market. For this reason, the concept of the Internet of Things Operating System (IoT OS) came into being. IoT operating system refers to the software platform that is based on operating system kernel (like RTOS, Linux, etc.) and includes relatively complete middleware components such as a file system, graphics library, etc. It has low overhead and high security, abides by the Communication Protocol and is capable of connecting to the cloud. RT-Thread is an IoT OS.
One of the main differences between RT-Thread and many other RTOSs such as FreeRTOS and uC/OS is that it is not only a real-time kernel, but also has a rich middle-tier component, as shown in the following figure.
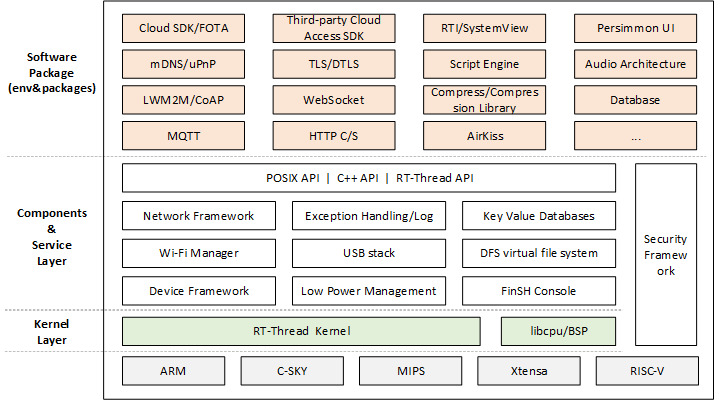
It includes:
- Kernel layer: RT-Thread kernel, the core part of RT-Thread, includes the implementation of objects in the kernel system, such as multi-threading and its scheduling, semaphore, mailbox, message queue, memory management, timer, etc.; libcpu/BSP (Chip Migration Related Files/Board Support Package) is closely related to hardware and consists of peripheral drivers and CPU transport.
- Components and Service Layer: Components are based on upper-level software on top of the RT-Thread kernel, such as virtual file systems, FinSH command-line interfaces, network frameworks, device frameworks, and more. Its modular design allows for high internal cohesion within the assembly and low coupling between components.
- RT-Thread software package: A general-purpose software component running on the RT-Thread IoT operating system platform for different application areas, consisting of description information, source code or library files. RT-Thread provides an open package platform with officially available or developer-supplied packages that provide developers with a choice of reusable packages that are an important part of the RT-Thread ecosystem. The package ecosystem is critical to the choice of an operating system because these packages are highly reusable and modular, making it easy for application developers to build the system they want in the shortest amount of time. RT-Thread supports more than 60 software packages, listed below:
- Internet of Things related software packages: Paho MQTT, WebClient, mongoose, WebTerminal, etc.
- Scripting language related software packages: JerryScript and MicroPython are currently supported.
- Multimedia related software packages: Openmv, mupdf.
- Tools packages: CmBacktrace, EasyFlash, EasyLogger, SystemView.
- System related software packages: RTGUI, Persimmon UI, lwext4, partition, SQLite, etc.
- Peripheral library and driver software packages: RealTek RTL8710BN SDK.
- Others.