|
|
||
|---|---|---|
| .. | ||
| applications | ||
| board | ||
| figures | ||
| xip | ||
| .config | ||
| Kconfig | ||
| README.md | ||
| README_zh.md | ||
| SConscript | ||
| SConstruct | ||
| project.ewd | ||
| project.ewp | ||
| project.eww | ||
| project.uvoptx | ||
| project.uvprojx | ||
| rtconfig.h | ||
| rtconfig.py | ||
| template.ewd | ||
| template.ewp | ||
| template.ewt | ||
| template.eww | ||
| template.uvoptx | ||
| template.uvprojx | ||
README.md
NXP i. MX RT1020 EVK BSP(Board Support Package) Execution Instruction.
中文页 |
Introduction
This document records the execution instruction of the BSP (board support package) provided by the RT-Thread development team for the NXP i. MX RT1020 EVK development board.
The document is covered in three parts:
- NXP i. MX RT1020 EVK Board Resources Introduction
- Quickly Get Started
- Advanced Features
By reading the Quickly Get Started section developers can quickly get their hands on this BSP and run RT-Thread on the board. More advanced features will be introduced in the Advanced Features section to help developers take advantage of RT-Thread to drive more on-board resources.
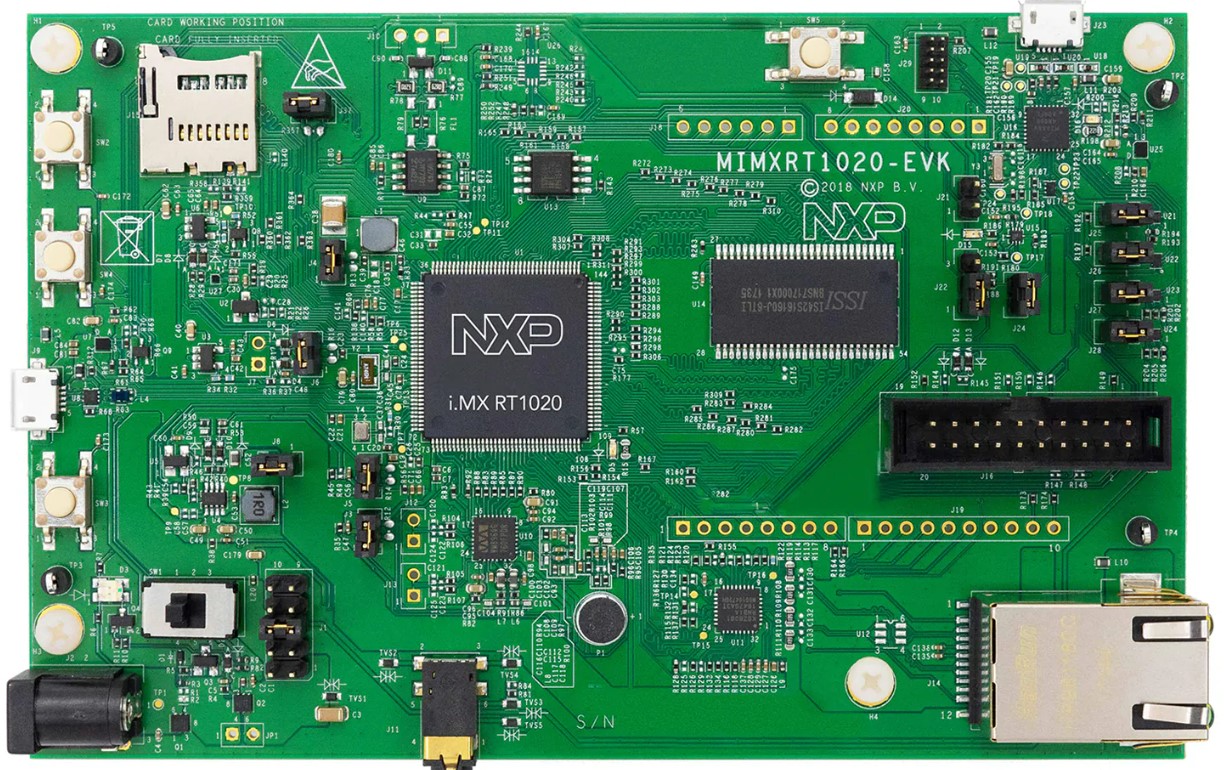
Board Resources Introduction
The i.MX RT1020 EVK is a 2-layer low-cost through-hole USB-powered PCB. At its heart lies the i.MX RT1020 crossover MCU in LQFP144 package, featuring NXP’s advanced implementation of the Arm® Cortex®-M7 core. This core operates at speeds up to 500 MHz to provide high CPU performance and excellent real-time response.
Peripheral Condition
Each peripheral supporting condition for this BSP is as follows:
| On-board Peripherals | Support | Remark |
|---|---|---|
| USB | √ | |
| SPI Flash | √ | |
| Ethernet | √ | |
| On-chip Peripherals | Support | Remark |
| GPIO | √ | |
| SPI | √ | |
| I2C | √ | |
| SDIO | √ | |
| RTC | √ | |
| PWM | √ |
Execution Instruction
Quickly Get Started
This BSP provides MDK 5 and IAR projects for developers. Here's an example of the IAR development environment, to introduce how to run the system.
Hardware Connection
Use a USB cable to connect the development board to the PC and turn on the power switch.
Compile and Download
Double-click the project.eww file, to open the IAR project, compile and download the project to the board.
By default, the project uses the CMSIS-DAP to download the program, when the CMSIS-DAP connects the board, clicking the download button can download the program to the board.
Running Results
Once the project is successfully downloaded, the system runs automatically. The green LED on the board will flash periodically.
Connect the serial port of the board to the PC, communicate with it via a serial terminal tool(115200-8-1-N). Reset the board and the startup information of RT-Thread will be observed:
\ | /
- RT - Thread Operating System
/ | \ 4.1.1 build May 13 2022 11:37:59
2006 - 2022 Copyright by RT-Thread team
Advanced Features
This BSP only enables GPIO and serial port 1 by default. If you need more advanced features, you need to configure the BSP with RT-Thread Env tools, as follows:
- Open the env tool under BSP;
- Enter menuconfig command to configure the project, then save and exit;
- Enter pkgs --update command to update the package;
- Enter scons --target=mdk5/iar command to regenerate the project.
Learn how to use RT-Thread Env, click Here.