7.0 KiB
7.0 KiB
STM32F103 Blue-Pill开发板的Arduino生态兼容说明
English | 中文
1 RTduino - RT-Thread的Arduino生态兼容层
STM32F103 Blue-Pill开发板已经完整适配了RTduino软件包,即RT-Thread的Arduino生态兼容层。用户可以按照Arduino的编程习惯来操作该BSP,并且可以使用大量Arduino社区丰富的库,是对RT-Thread生态的极大增强。更多信息,请参见RTduino软件包说明文档。
1.1 如何开启针对本BSP的Arduino生态兼容层
Env 工具下敲入 menuconfig 命令,或者 RT-Thread Studio IDE 下选择 RT-Thread Settings:
Hardware Drivers Config --->
Onboard Peripheral Drivers --->
[*] Support Arduino
2 Arduino引脚排布
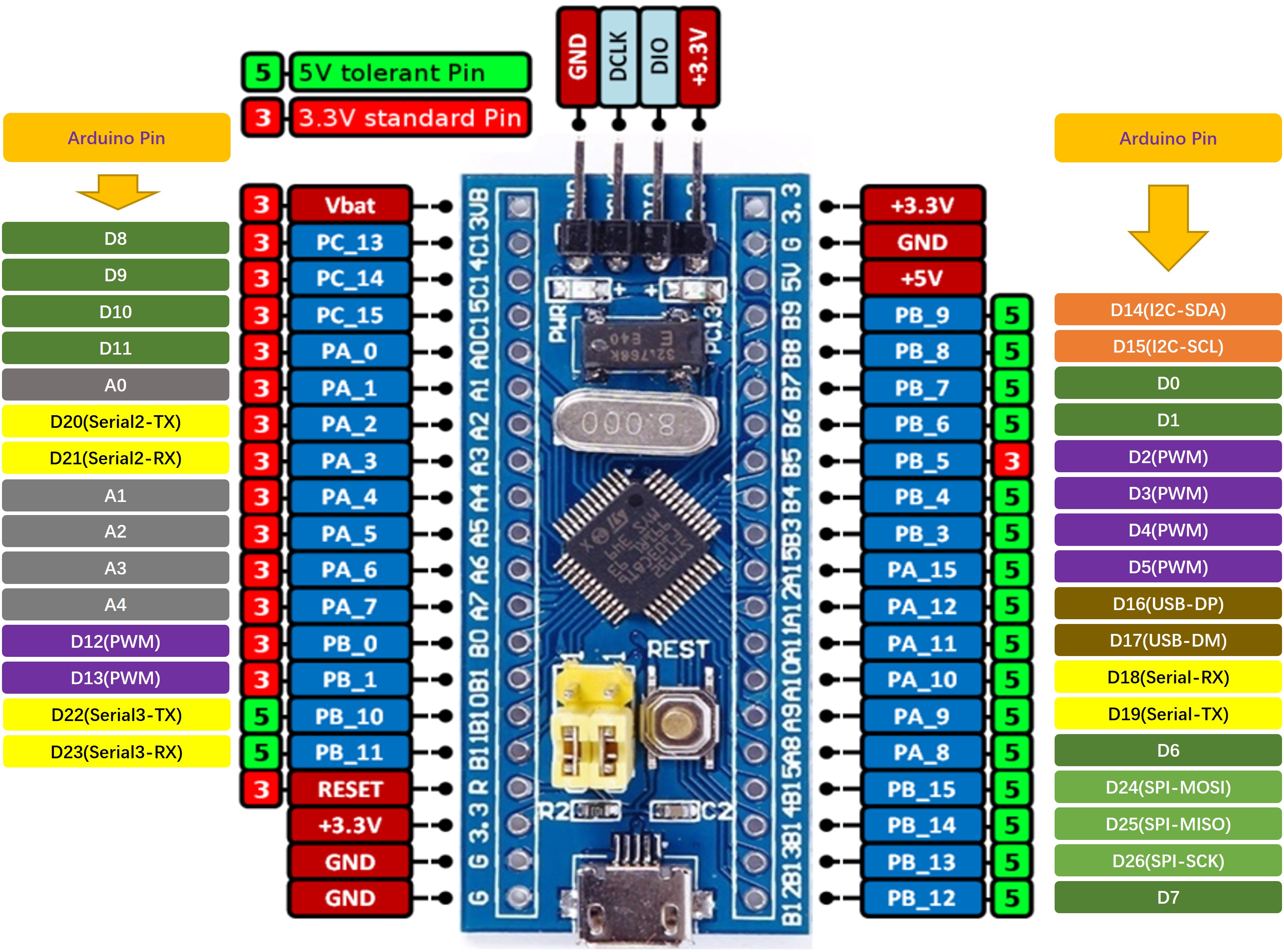
| Arduino引脚编号 | STM32引脚编号 | 5V容忍 | 备注 |
|---|---|---|---|
| 0 (D0) | PB7 | 是 | |
| 1 (D1) | PB6 | 是 | |
| 2 (D2) | PB5 | 否 | PWM3-CH2,默认被RT-Thread的PWM设备框架pwm3接管 |
| 3 (D3) | PB4 | 是 | PWM3-CH1,默认被RT-Thread的PWM设备框架pwm3接管 |
| 4 (D4) | PB3 | 是 | PWM2-CH2,默认被RT-Thread的PWM设备框架pwm2接管 |
| 5 (D5) | PA15 | 是 | PWM2-CH1,默认被RT-Thread的PWM设备框架pwm2接管 |
| 6 (D6) | PA8 | 是 | |
| 7 (D7, SS) | PB12 | 是 | SPI片选默认引脚 |
| 8 (D8, LED_BUILTIN) | PC13 | 否 | 板载LED |
| 9 (D9) | PC14 | 否 | |
| 10 (D10) | PC15 | 否 | |
| 11 (D11) | PA0 | 否 | |
| 12 (D12) | PB0 | 否 | PWM3-CH3,默认被RT-Thread的PWM设备框架pwm3接管 |
| 13 (D13) | PB1 | 否 | PWM3-CH4,默认被RT-Thread的PWM设备框架pwm3接管 |
| 14 (D14) | PB9 | 是 | I2C-SDA,默认被RT-Thread的I2C设备框架i2c1总线接管 |
| 15 (D15) | PB8 | 是 | I2C-SCL,默认被RT-Thread的I2C设备框架i2c1总线接管 |
| 16 (D16) | PA12 | 是 | USB-DP,默认被 TinyUSB软件包 接管 |
| 17 (D17) | PA11 | 是 | USB-DM,默认被 TinyUSB软件包 接管 |
| 18 (D18) | PA10 | 是 | Serial-Rx,默认被RT-Thread的UART设备框架uart1接管 |
| 19 (D19) | PA9 | 是 | Serial-Tx,默认被RT-Thread的UART设备框架uart1接管 |
| 20 (D20) | PA2 | 否 | Serial2-Tx,默认被RT-Thread的UART设备框架uart2接管 |
| 21 (D21) | PA3 | 否 | Serial2-Rx,默认被RT-Thread的UART设备框架uart2接管 |
| 22 (D22) | PB10 | 是 | Serial3-Tx,默认被RT-Thread的UART设备框架uart3接管 |
| 23 (D23) | PB11 | 是 | Serial3-Rx,默认被RT-Thread的UART设备框架uart3接管 |
| 24 (D24) | PB15 | 是 | SPI-MOSI,默认被RT-Thread的SPI设备框架spi2接管 |
| 25 (D25) | PB14 | 是 | SPI-MISO,默认被RT-Thread的SPI设备框架spi2接管 |
| 26 (D26) | PB13 | 是 | SPI-SCK ,默认被RT-Thread的SPI设备框架spi2接管 |
| 27 (A0) | PA1 | 否 | ADC1-CH1,默认被RT-Thread的ADC设备框架adc1接管 |
| 28 (A1) | PA4 | 否 | ADC1-CH4,默认被RT-Thread的ADC设备框架adc1接管 |
| 29 (A2) | PA5 | 否 | ADC1-CH5,默认被RT-Thread的ADC设备框架adc1接管 |
| 30 (A3) | PA6 | 否 | ADC1-CH6,默认被RT-Thread的ADC设备框架adc1接管 |
| 31 (A4) | PA7 | 否 | ADC1-CH7,默认被RT-Thread的ADC设备框架adc1接管 |
| 32 (A5) | -- | 芯片内部参考电压 ADC,默认被RT-Thread的ADC设备框架adc1接管 | |
| 33 (A6) | -- | 芯片内部温度 ADC,默认被RT-Thread的ADC设备框架adc1接管 |
注意:
- 如果同时驱动舵机和调度analogWrite函数要选择不同定时器发生的PWM信号引脚,由于STM32的定时器4个通道需要保持相同的频率,如果采用相同的定时器发生的PWM分别驱动舵机和analogWrite,可能会导致舵机失效。
- 更多引脚布局相关信息参见 pins_arduino.c 和 pins_arduino.h
3 通信
3.1 I2C (Wire.h)
I2C总线是 D14 和 D15 引脚,这两个引脚默认是被RT-Thread I2C设备框架接管的,直接引用#include <Wire.h>(Arduino官方I2C头文件)即可使用。
3.2 SPI
SPI总线是 D24 、D25 和 D26 引脚,这三个引脚默认是被RT-Thread SPI设备框架接管的,直接引用#include <SPI.h>(Arduino官方SPI头文件)即可使用。此外,还使用到了片选引脚(SS),默认为 D7。
3.3 USB
默认支持USB虚拟串口,详见例程。
3.4 串口
默认支持通过 Serial. 方法调用 uart1 串口设备;通过 Serial2. 方法调用 uart2 串口设备;通过 Serial3. 方法调用 uart3 串口设备。详见例程。