|
|
||
|---|---|---|
| .. | ||
| applications | ||
| board | ||
| figures | ||
| .config | ||
| .gitignore | ||
| EventRecorderStub.scvd | ||
| Kconfig | ||
| README.md | ||
| README_zh.md | ||
| SConscript | ||
| SConstruct | ||
| project.ewd | ||
| project.ewp | ||
| project.eww | ||
| project.uvoptx | ||
| project.uvprojx | ||
| rtconfig.h | ||
| rtconfig.py | ||
| template.ewp | ||
| template.eww | ||
| template.uvoptx | ||
| template.uvprojx | ||
README.md
Part I : NUCLEO-STM32U575ZI-Q- BSP Introduction
English | 中文
MCU: STM32U575ZI @110MHz, 2048 KB FLASH, 786 KB RAM
The STM32U575xx devices belong to an ultra-low-power microcontrollers family (STM32U5 Series) based on the high-performance Arm® Cortex®-M33 32-bit RISC core. They operate at a frequency of up to 160 MHz.
The Cortex®-M33 core features a single-precision FPU (floating-point unit), that supports all the Arm® single-precision data-processing instructions and all the data types.
The Cortex®-M33 core also implements a full set of DSP (digital signal processing) instructions and a MPU (memory protection unit) that enhances the application security.
The devices embed high-speed memories (up to 2 Mbytes of Flash memory and 786 Kbytes of SRAM), a FSMC (flexible external memory controller) for static memories (for devices with packages of 90 pins and more), two Octo-SPI Flash memory interfaces (at least one Quad-SPI available on all packages) and an extensive range of enhanced I/Os and peripherals connected to three APB buses, three AHB buses and a 32-bit multi-AHB bus matrix.
The devices offer security foundation compliant with the TBSA (trusted-based security architecture) requirements from Arm®. It embeds the necessary security features to implement a secure boot, secure data storage and secure firmware update. Besides these capabilities, the devices incorporate a secure firmware installation feature, that allows the customer to secure the provisioning of the code during its production. A flexible lifecycle is managed thanks to multiple levels of readout protection and debug unlock with password. Firmware hardware isolation is supported thanks to securable peripherals, memories and I/Os, and privilege configuration of peripherals and memories.
The devices feature several protection mechanisms for embedded Flash memory and SRAM: readout protection, write protection, secure and hide protection areas.
The devices embed several peripherals reinforcing security: with DPA resistancea HASH hardware accelerator, and a true random number generator.
The devices offer active tamper detection and protection against transient and environmental perturbation attacks, thanks to several internal monitoring generating secret data erase in case of attack. This helps to fit the PCI requirements for point of sales applications.
The devices offer one fast 14-bit ADC (2.5 Msps), one 12-bit ADC (2.5 Msps), two comparators, two operational amplifiers, two DAC channels, an internal voltage reference buffer, a low-power RTC, four 32-bit general-purpose timers, two 16-bit PWM timers dedicated to motor control, three 16-bit general-purpose timers, two 16-bit basic timers and four 16-bit low-power timers.
The devices support a MDF (multi-function digital filter) with six filters dedicated to the connection of external sigma-delta modulators. Another low-power digital filter dedicated to audio signals is embedded (ADF), with one filter supporting sound-activity detection. The devices embed also a Chrom-ART Accelerator dedicated to graphic applications, and mathematical accelerators (a trigonometric functions accelerator plus a filter mathematical accelerator). In addition, up to 24 capacitive sensing channels are available.
The devices also feature standard and advanced communication interfaces such as: four I2Cs, three SPIs, three USARTs, two UARTs, one low-power UART, two SAIs, one digital camera interface (DCMI), two SDMMCs, one FDCAN, one USB OTG full-speed, one USB Type-C /USB Power Delivery controller, and one generic synchronous 8-/16-bit PSSI (parallel data input/output slave interface).
The devices operate in the –40 to +85 °C (+105 °C junction) and –40 to +125 °C (+130 °C junction) temperature ranges from a 1.71 to 3.6 V power supply.
A comprehensive set of power-saving modes allow the design of low-power applications. Many peripherals (including communication, analog, timers and audio peripherals) can be functional and autonomous down to Stop mode with direct memory access, thanks to LPBAM support (low-power background autonomous mode).
Some independent power supplies are supported like an analog independent supply input for ADC, DACs, OPAMPs and comparators, a 3.3 V dedicated supply input for USB and up to 14 I/Os, that can be supplied independently down to 1.08 V. A VBAT input is available for connecting a backup battery in order to preserve the RTC functionality and to backup 3232-bit registers and 2-Kbyte SRAM.
The devices offer eight packages from 48 to 169 pins.
KEY FEATURES
-
Includes ST state-of-the-art patented technology
-
Ultra-low-power with FlexPowerControl
- 1.71 V to 3.6 V power supply
- –40 °C to +85/125 °C temperature range
- Low-power background autonomous mode (LPBAM): autonomous peripherals with DMA, functional down to Stop 2 mode
- VBAT mode: supply for RTC, 32 x 32-bit backup registers and 2-Kbyte backup SRAM
- 160 nA Shutdown mode (24 wakeup pins)
- 210 nA Standby mode (24 wakeup pins)
- 440 nA Standby mode with RTC
- 1.9 μA Stop 3 mode with 16-Kbyte SRAM4.3 µA Stop 3 mode with full SRAM
- 4.0 µA Stop 2 mode with 16-Kbyte SRAM
- 8.95 µA Stop 2 mode with full SRAM
- 19.5 μA/MHz Run mode @ 3.3 V
-
Core
-
Arm® 32-bit Cortex®-M33 CPU with TrustZone®, MPU, DSP, and FPU
-
ART Accelerator
-
8-Kbyte instruction cache allowing 0-wait-state execution from Flash and external memories: up to 160 MHz, 240 DMIPS
-
4-Kbyte data cache for external memories
-
Power management
- Embedded regulator (LDO) and SMPSstep-down converter supporting switchon-the-fly and voltage scaling
-
Benchmarks
- 1.5 DMIPS/MHz (Drystone 2.1)
- 651 CoreMark® (4.07 CoreMark®/MHz)
- 535 ULPMark™-CP
- 149 ULPMark™-PP
- 58.2 ULPMark™-CM
- 133000 SecureMark™-TLS
-
Memories - 2-Mbyte Flash memory with ECC, 2 banks read-while-write, including 512 Kbytes with 100 kcycles
- 86-Kbyte SRAM with ECC OFF or 722-Kbyte SRAM including up to 322-Kbyte SRAM with ECC ON
- External memory interface supporting SRAM, PSRAM, NOR, NAND and FRAM memories
- 2 Octo-SPI memory interfaces
-
Security
- Arm® TrustZone® and securable I/Os, memories and peripherals
- Flexible life cycle scheme with RDP and password protected debug
- Root of trust thanks to unique boot entry and secure hide protection area (HDP)
- Secure firmware installation (SFI) thanks to embedded root secure services (RSS)
- Secure firmware upgrade support with TF-M
- HASH hardware accelerator
- True random number generator, NIST SP800-90B compliant
- 96-bit unique ID
- 512-byte OTP (one-time programmable)
- Active tampers
-
Clock management
- 4 to 50 MHz crystal oscillator
- 32 kHz crystal oscillator for RTC (LSE)
- Internal 16 MHz factory-trimmed RC (±1%)
- Internal low-power 32 kHz RC (±5%)
- 2 internal multispeed 100 kHz to 48 MHz oscillators, including one auto-trimmed by LSE (better than ±0.25% accuracy)
- Internal 48 MHz with clock recovery
- 3 PLLs for system clock, USB, audio, ADC
-
General-purpose input/outputs
- Up to 136 fast I/Os with interrupt capability most 5V-tolerant and up to 14 I/Os with independent supply down to 1.08 V
-
Up to 17 timers and 2 watchdogs
- 19 timers/watchdogs: 2 16-bit advanced motor-control, 4 32-bit, 5 16-bit, 4 low-power 16-bit (available in Stop mode), 2 SysTick timers and 2 watchdogs
- RTC with hardware calendar and calibration
-
Up to 22 communication peripherals
- 1 USB Type-C®/USB power delivery controller
- 1 USB OTG 2.0 full-speed controller
- 2 SAIs (serial-audio interface)
- 4 I2C FM+(1 Mbit/s), SMBus/PMBus™
- 6 USARTs (ISO 7816, LIN, IrDA, modem)
- 3 SPIs (5x SPIs with the dual OCTOSPI)
- 1 CAN FD controller
- 2 SDMMC interfaces
- 1 multi-function digital filter (6 filters)+ 1 audio digital filter with sound-activity detection
- Parallel synchronous slave interface
-
16- and 4-channel DMA controllers, functional in Stop mode
-
Graphic features
- Chrom-ART Accelerator (DMA2D) for enhanced graphic content creation
- 1 digital camera interface
-
Mathematical co-processor
- CORDIC for trigonometric functions acceleration
- Filter mathematical accelerator (FMAC)
-
Up to 24 capacitive sensing channels
- Support touch key, linear and rotary touch sensors
-
Rich analog peripherals (independent supply)
- 14-bit ADC 2.5-Msps with hardware oversampling
- 12-bit ADC 2.5-Msps, with hardware oversampling, autonomous in Stop 2 mode
- 2 12-bit DAC, low-power sample and hold
- 2 operational amplifiers with built-in PGA
- 2 ultra-low-power comparators
- Development support: serial-wire debug (SWD), JTAG, Embedded Trace Macrocell™ (ETM)
-
ECOPACK2 compliant packages
Read more
| Documents | Description |
|---|---|
| STM32_Nucleo-144_BSP_Introduction | How to run RT-Thread on STM32 Nucleo-144 boards (Must-Read) |
| STM32U575ZI ST Official Website | STM32U575ZI datasheet and other resources |
Maintained By
Part II : NUCLEO-STM32U575ZI-Q Getting Started Guide
NUCLEO-U575ZI-Q Getting Started Guide is introduced by using the example of SPI1 driving RW007 module to realize the introduction of NUCLEO-U575ZI-Q.
Preparatory Work
Before NUCLEO-U575ZI-Q driver RW007 runs, the following preparations are essential, and you will need:
1.NUCLEO-U575ZI-Q
2.RW007 WiFi module
3.Mini-USB Connecting cable (connecting the development board with the computer)
4.ENV Compile build environment(Installation instructions)
5.common software(git,Keil5,STM32CubeMX,Serial debugging, etc)
Start on the Road
RT-Thread contains RW007 software package, so users don't need to write their own drivers. Taking SPI mode as an example, this paper introduces how to drive RW007 module on NUCLEO-U575ZI-Q, and complete basic WiFi functions such as AP scanning and connection.
Hardware connection
Thanks to the Arduino interface on Nucleo, just plug RW007 into the development board, and the hardware connection between them can be completed.

According to the following schematic diagram, the corresponding table between IO interfaces and functions can be found as follows:

|STM32 pin name | pin serial number |Arduino Interface serial number|function |
|PA5 | 5 |D13 |BOOT0/CLK |
|PA6 | 6 |D12 |MISO |
|PA7 | 7 |D11 |MOSI |
|PD14 | 62 |D10 |BOOT1/CS |
|PD15 | 63 |D9 |INT/BUSY |
|PF12 | 92 |D8 |RESET |
STM32 BSP Deploy(Menuconfig)
1.Download RT-Thread Source Code
GitHub link:https://github.com/RT-Thread/rt-thread
Open the 'rt-thread\bsp\stm32' directory and you will see the development board model supported by rt-thread. It is not difficult to get RT-Thread running on STM32, but bsp needs to be configured briefly before compiling the kernel components.The bsp used in this experiment was stm32u575-st-nucleo.
2.The SPI Initializer is Configured Through CubeMX
In general, the pin assignment of STM32 series can open the CubeMX project corresponding to the CubeMX_Config.ioc in the board\ CubeMX_Config directory in BSP, configure SPI1, generate code, and save and exit.

3. Configure the RW007 Package Through Menuconfig
Go to the rt-thread\ bsp\ stm32\ stm32u575-st-nucleo folder, right-click to open the ENV window (provided that the ENV environment has been built under Windows), and type menuconfig to configure the system:
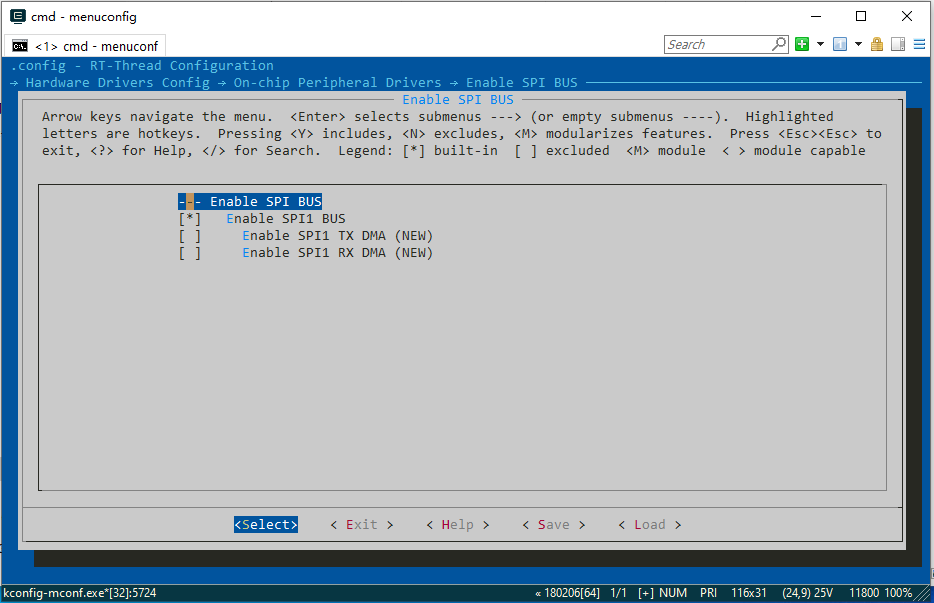
3.1 Turn on the SPI Device
The communication between the development board and the module depends on the SPI device. The SPI driver has been implemented in bsp and can be used as long as it is opened in the setting. Go to On-chip Peripheral Drivers under On-chip Peripheral-> , check the Enable SPI BUS-- > option, press enter to enter, and further select Enable SPI1 BUS to complete the configuration:



If there is no configuration for the corresponding spi in the menuconfig in the bsp, you can increase the configuration of the corresponding spi by modifying the Kconfig file. Add the configuration of SPI1 to the path of Kconfig under board/Kconfig, menu "On-chip Peripheral Drivers" .
menuconfig BSP_USING_SPI
bool "Enable SPI BUS"
default n
select RT_USING_SPI
if BSP_USING_SPI
config BSP_USING_SPI1
bool "Enable SPI1 BUS"
default n
config BSP_SPI1_TX_USING_DMA
bool "Enable SPI1 TX DMA"
depends on BSP_USING_SPI1
default n
config BSP_SPI1_RX_USING_DMA
bool "Enable SPI1 RX DMA"
depends on BSP_USING_SPI1
select BSP_SPI1_TX_USING_DMA
default n
endif
3.2 Configure the RW007 Package.
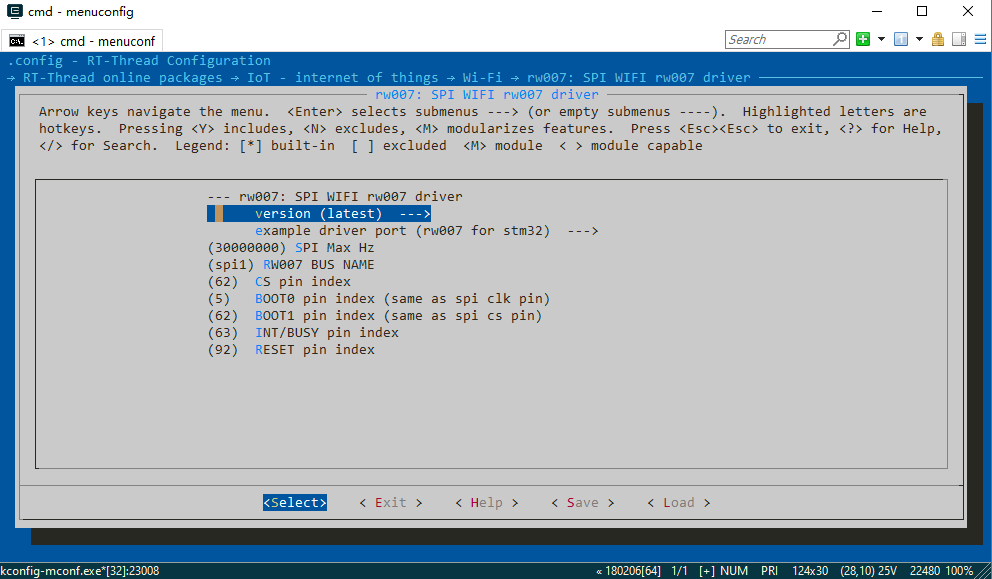
RT-Thread provides supporting driver support for RW007 modules in the form of software packages. The default options of the system do not include software packages. Users need to enable them manually: return to the Menuconfig main interface through the Esc key, enter RT-Thread online packages-- > , IoT-internet of things->, Wi-Fi-- > , and check the rw007: SPI WIFI rw007 driver-- > option:

RW007 package Github repository link:RT-Thread-packages/rw007: RW007 (SPI Wi-Fi module) driver for RT-Thread
Then press Enter key to further set the parameters of the software package, complete the configuration of SPI bus and IO, change the bus device name RW007 BUS NAME to spi1, then configure SPI to control IO, and fill in each pin number according to the serial number of the following figure:
3.3 Open the WiFi framework.
The RW007 driver uses WLAN-related APIs. Click the following options to open the WiFi framework: RT-Thread Components-- > , Device Drivers-- >, Using WiFi-- > , and check Using Wi-Fi framework:

3.4 Save Menuconfig configuration.
After completing the above three steps, the bsp configuration is complete, but the most important step is not to be omitted. Save the Menuconfig configuration: press the Esc key all the way to exit, and select Yes in the Save prompt window to confirm.
4. Modify part of the project code.
Open the project and replace the content of the wifi_spi_device_init (void) function in the wifi_spi_device_init port.c file with the following code:
int wifi_spi_device_init(void)
{
char sn_version[32];
rw007_gpio_init();
rt_hw_spi_device_attach(RW007_SPI_BUS_NAME, "wspi", RW007_CS_PIN);
rt_hw_wifi_init("wspi");
rt_wlan_set_mode(RT_WLAN_DEVICE_STA_NAME, RT_WLAN_STATION);
rt_wlan_set_mode(RT_WLAN_DEVICE_AP_NAME, RT_WLAN_AP);
rw007_sn_get(sn_version);
rt_kprintf("\nrw007 sn: [%s]\n", sn_version);
rw007_version_get(sn_version);
rt_kprintf("rw007 ver: [%s]\n\n", sn_version);
return 0;
}
5. Compile and Download the Project.
Use the Build button of the toolbar to compile the project. 0Error (s) indicates that the compilation is successful. Connect the development board to the computer, and then click the Download button to download the firmware to the development board.
Running and Testing Module Functions.
After downloading the program, it can automatically reset and run, open the serial port tool (recommended to use XShell and other interactive terminals), and set the parameter to 1152008-1mi N. If the system starts normally and there is no problem with the communication between the development board and the module, you will see the following initialization print message:

When rw007 sn and rw007 ver can output normally without garbled code, the RW007 driver is successful!
Wifi networking test.
Enter the wifi scan command in shell to search for wifi:

Connection Target wifi Test:

The figure above shows that wifi successfully connects to the hotspot Meet.
At this point, the basic environment of STM32U575- NUCLEO is built and tested!
References:
Matters Needing Attention:
- It is best to use a newer version of MDK, and this experiment was carried out under the MDK5.36 version.
- Please choose the latest version of the RW007 software package, otherwise the version will not be compatible and the project will report an error. If you have not selected the latest version of the RW007 package, download the RW007 package in the link below and replace the file in
bsp\ stm32\ stm32u575-st-nucleo\ packages\ rw007- xxx! (however, the above step of modifying part of the project code is also necessary. If the content of thewifi_spi_device_init (void)function in the projectwifi_spi_device_init port.cfile is the same as that given, it can be ignored! ).
RW007 package Github repository link: RT-Thread-packages/rw007: RW007 (SPI Wi-Fi module) driver for RT-Thread - At present, in this experimental test, it is found that RW007 will time out, and a suitable solution has not been found, but it does not affect the normal use of RW007 module.