|
|
||
|---|---|---|
| .. | ||
| applications | ||
| board | ||
| figures | ||
| .config | ||
| .gitignore | ||
| EventRecorderStub.scvd | ||
| Kconfig | ||
| README.md | ||
| SConscript | ||
| SConstruct | ||
| project.ewd | ||
| project.ewp | ||
| project.eww | ||
| project.uvopt | ||
| project.uvoptx | ||
| project.uvproj | ||
| project.uvprojx | ||
| rtconfig.h | ||
| rtconfig.py | ||
| template.ewd | ||
| template.ewp | ||
| template.eww | ||
| template.uvopt | ||
| template.uvoptx | ||
| template.uvproj | ||
| template.uvprojx | ||
README.md
STM32F427 RoboMaster A板 BSP 说明
简介
本文档为 RoboMaster A板 开发板的 BSP (板级支持包) 说明。
主要内容如下:
- 开发板资源介绍
- BSP 快速上手
- 进阶使用方法
通过阅读快速上手章节开发者可以快速地上手该 BSP,将 RT-Thread 运行在开发板上。在进阶使用指南章节,将会介绍更多高级功能,帮助开发者利用 RT-Thread 驱动更多板载资源。
开发板介绍
RoboMaster开发板套件是一款面向机器人DIY的开源主控套件。开发板主控芯片为STM32F427IIH6,拥有丰富的扩展接口和通信接口,板载IMU传感器,可配合RoboMaster出品的M3508、 M2006直流无刷减速电机、UWB模块以及妙算等产品使用,亦可配合DJI飞控SDK使用,配件丰富。
开发板外观如下图所示:
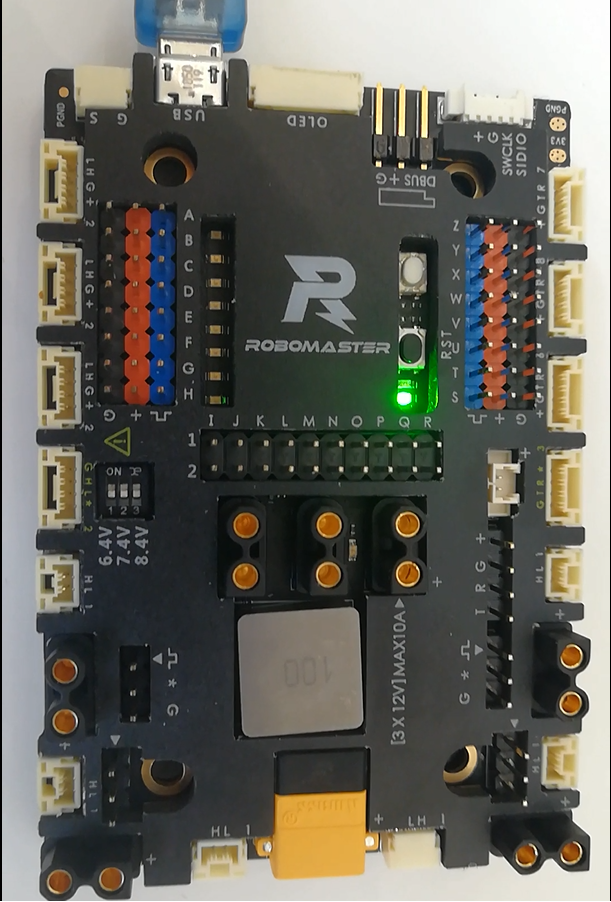
该开发板常用 板载资源 如下:
- MCU:STM32f427IIH6,主频 180MHz,2048KB FLASH ,256KB RAM(含64KB CCM RAM未使用)
- 常用外设
- LED:2个,D10(红色,PE11),D9(绿色,PE14)
- 按键:1个,KEY(PB2)
- 常用接口:SD 卡接口 OLED接口
- 调试接口,标准 JTAG/SWD
开发板更多详细信息请参考 RoboMaster官网 RoboMaster A板开发板介绍。
外设支持
本 BSP 目前对外设的支持情况如下:
| 板载外设 | 支持情况 | 备注 |
|---|---|---|
| SD卡 | 支持 | |
| CAN | 支持 | 需通过24vXT30接口或usb接口供电 |
| 片上外设 | 支持情况 | 备注 |
| GPIO | 支持 | PA0, PA1... PK15 ---> PIN: 0, 1...176 |
| UART | 支持 | UART1/3/6/7/8 |
| SPI | 暂不支持 | SPI5 |
| I2C | 暂不支持 | |
| SDIO | 暂不支持 | 即将支持 |
| RTC | 不支持 | |
| PWM | 暂不支持 | 即将支持 |
| 扩展模块 | 支持情况 | 备注 |
| 无 | ... | ... |
使用说明
使用说明分为如下两个章节:
-
快速上手
本章节是为刚接触 RT-Thread 的新手准备的使用说明,遵循简单的步骤即可将 RT-Thread 操作系统运行在该开发板上,看到实验效果 。
-
进阶使用
本章节是为需要在 RT-Thread 操作系统上使用更多开发板资源的开发者准备的。通过使用 ENV 工具对 BSP 进行配置,可以开启更多板载资源,实现更多高级功能。
快速上手
本 BSP 为开发者提供 MDK5 和 IAR 工程,并且支持 GCC 开发环境。下面以 MDK5 开发环境为例,介绍如何将系统运行起来。
硬件连接
使用usb或j-link连接开发板到 PC。
编译下载
双击 project.uvprojx 文件,打开 MDK5 工程,编译并下载程序到开发板。
工程默认配置使用 xxx 仿真器下载程序,在通过 xxx 连接开发板的基础上,点击下载按钮即可下载程序到开发板
运行结果
下载程序成功之后,系统会自动运行,绿色LED灯闪烁 。
连接开发板对应串口到 PC , 在终端工具里打开相应的串口(115200-8-1-N),复位设备后,可以看到 RT-Thread 的输出信息:
\ | /
- RT - Thread Operating System
/ | \ 4.0.2 build Sep 1 2019
2006 - 2019 Copyright by rt-thread team
msh >
进阶使用
此 BSP 默认只开启了 GPIO 和 串口6 的功能,如果需使用 SD 卡、Flash 等更多高级功能,需要利用 ENV 工具对BSP 进行配置,步骤如下:
-
在 bsp 下打开 env 工具。
-
输入
menuconfig命令配置工程,配置好之后保存退出。 -
输入
pkgs --update命令更新软件包。 -
输入
scons --target=mdk4/mdk5/iar命令重新生成工程。
本章节更多详细的介绍请参考 STM32 系列 BSP 外设驱动使用教程。
注意事项
-
- 由于本开发板的电源设计较为复杂。使用本开发板时,强烈建议您通过24v直流XT30接口(上图中下方黄色电源接口) 进行供电 ,此时红色电源指示灯(位于黑色按键下方)会亮起。否则可能导致部分板载外设(例如CAN通信)因无法上电而无法正常使用,详情请参见官方提供的原理图。
联系人信息
维护人: