* [console] 解决在没有定义RT_USING_DEVICE的情况下使用device报错的问题 * format codes * [libc] 整理格式 * refresh projects |
||
|---|---|---|
| .. | ||
| applications | ||
| drivers | ||
| figures | ||
| libraries | ||
| .config | ||
| Kconfig | ||
| README.md | ||
| SConscript | ||
| SConstruct | ||
| ft_aarch32.lds | ||
| make.sh | ||
| rtconfig.h | ||
| rtconfig.py | ||
README.md
ft2004 四核开发板 BSP 说明
简介
本文档为 飞腾技术公司 ft2000/4 开发板的 BSP (板级支持包) 说明。
主要内容如下:
- 开发板资源介绍
- BSP 外设支持
- 使用方法
- 相关实验
1. 开发板资源介绍
FT-2000/4 是一款面向桌面应用的高性能通用 4 核处理器。每 2 个核构成 1 个处理器核簇(Cluster),并共享 L2 Cache。主要技术特征如下:
- 兼容 ARM v8 64 位指令系统,兼容 32 位指令
- 支持单精度、双精度浮点运算指令
- 支持 ASIMD 处理指令
- 集成 2 个 DDR4 通道,可对 DDR 存储数据进行实时加密
- 集成 34 Lane PCIE3.0 接口:2 个 X16(每个可拆分成 2 个 X8),2 个 X1
- 集成 2 个 GMAC,RGMII 接口,支持 10/100/1000 自适应
- 集成 1 个 SD 卡控制器,兼容 SD 2.0 规范
- 集成 1 个 HDAudio,支持音频输出,可同时支持最多 4 个 Codec
- 集成 SM2、SM3、SM4 模块
- 集成 4 个 UART,1 个 LPC,32 个 GPIO,4 个 I2C,1 个 QSPI,2 个通 用 SPI,2 个 WDT,16 个外部中断(和 GPIO 共用 IO)
- 集成温度传感器
2. BSP 外设支持
| 外设名 | 支持情况 | 备注 |
|---|---|---|
| ft_gicv3 | 支持 | gicv3 中断控制器 |
| ft_gmac | 支持 | ft gmac 千兆网卡控制器 |
| ft_i2c | 支持 | FT I2C |
| ft_qspi | 支持 | FT qspi 控制器 |
| ft_sd | 支持 | FT mmcsd 控制器 |
| ft_uart | 支持 | PrimeCell PL011 |
| ft_spi | 支持 | FT spi 控制器 |
| ft_gpio | 支持 | FT gpio 控制器 |
| ft_can | 支持 | FT can 控制器 |
3. 使用方法
ubuntu 上环境搭建
- 在 ubuntu 环境下通过指令,下载并安装交叉编译链
sudo apt-get install gcc-arm-none-eabi
- 安装之后,通过指令,确定交叉编译链安装完毕
arm-none-eabi-gcc -v
-
搭建 tftp 环境
- 在主机安装 tftp 服务
使用 ubuntu 完成下列操作
sudo apt-get install tftp-hpa tftpd-hpa sudo apt-get install xinetd- 新建 tftboot 目录,如:
/mnt/d/tftboot
需要给 tftboot 目录执行权限
chmod 777 /**/tftboot- 配置主机 tftpboot 服务
新建并配置文件/etc/xinetd.d/tftp
# /etc/xinetd.d/tftp server tftp { socket_type = dgram protocol = udp wait = yes user = root server = /usr/sbin/in.tftpd server_args = -s /mnt/d/tftboot disable = no per_source = 11 cps = 100 2 flags = IPv4 }- 启动主机 tftp 服务
sudo service tftpd-hpa start- 修改主机 tftp 配置 修改/etc/default/tftpd-hpa
sudo nano /etc/default/tftpd-hpa # /etc/default/tftpd-hpa TFTP_USERNAME="tftp" TFTP_DIRECTORY="/mnt/d/tftboot" TFTP_ADDRESS=":69" TFTP_OPTIONS="-l -c -s"- 重启主机 tftp 服务
每次开机要重启一次
sudo service tftpd-hpa restart- 测试主机 tftp 服务的可用性
登录 tftp 服务,获取一个文件
$ tftp 192.168.4.50 tftp> get test1234 tftp> q - 在主机安装 tftp 服务
执行
-
将本 bsp 包拷贝至 RT-THREAD bsp/目录下
-
在 Ubuntu 终端下,切换至 bsp 目录
cd rt-thread/bsp/ft2004
-
使用 scons -c 清空工程缓存
-
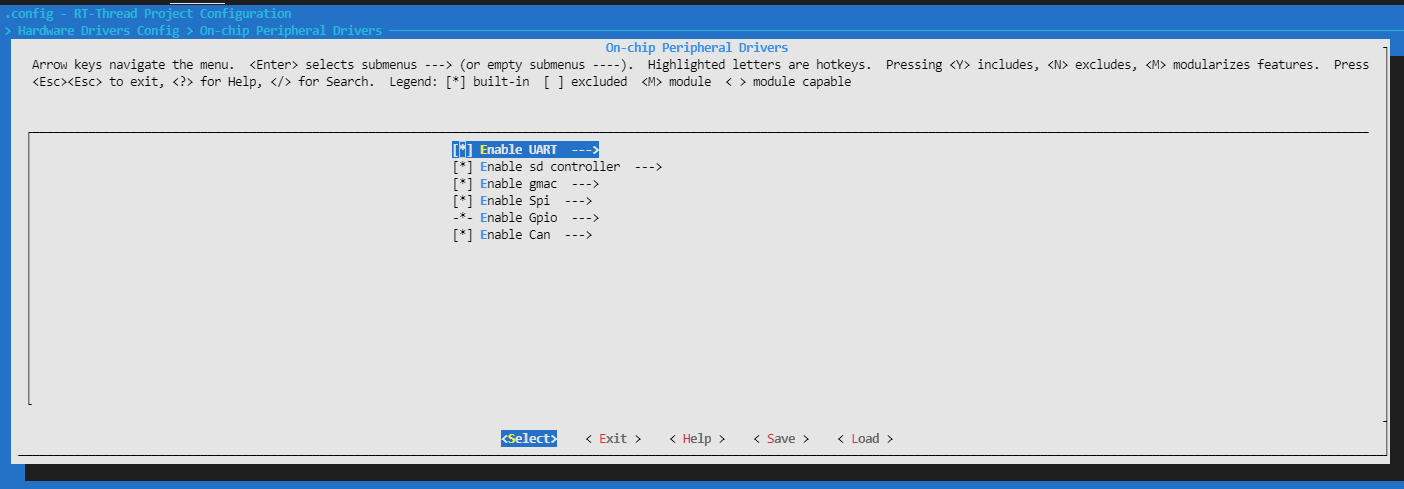
使用 scons --menuconfig 配置需要的外设
-
使用 scons 编译代码,得到 rtthread.bin,并将 rtthread.bin 放入之前配置的 tftp 路径下。
-
连接开发板对应串口到 PC, 在终端工具里打开相应的串口(115200-8-1-N)。
-
将开发板网线接入局域网中
-
本开发板自带 uboot,使用 uboot 自带 指令进行将 bin 文件下载至 ram 中
setenv ipaddr 192.168.x.x # 设置开发板ip
setenv serverip 192.168.x.x # 设置tftp服务器ip
setenv gatewayip 192.168.x.x # 设置网关ip
tftpboot 80100000 rtthread.bin # 在主机 /tftpboot目录中的rtthread.bin文件下载到开发板内存的80100000地址中。
- 执行跳转指令,便可以正常执行
bootvx32 80100000
或
boot32 80100000
5. 相关实验
网卡
-
主机 ping 本机 指令 sudo ping 192.168.3.20 (默认)
-
rtt ping 主机 指令 ping 192.168.x.x (根据实际情况)
-
通过界面

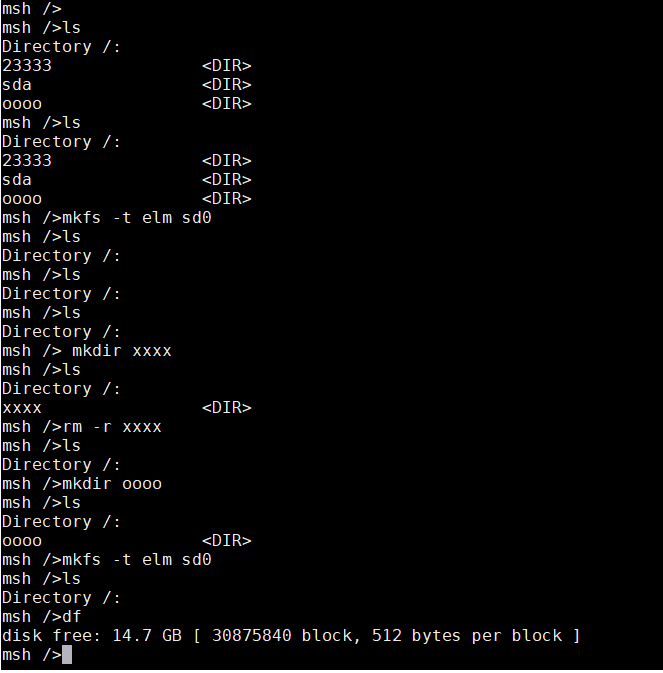
sd 卡调试
- 通过基本命令进行,mv ,echo ,ls ,cd ,rm ....
spi flash 卡调试
- 找一块有 spi flash 插槽的 ft-2004 开发板,插入 sf25s 或 gd25q 系列 spi flash
- 配置 rt-thread 的编译选项,打开 BSP_USE_SPI 和 BSP_USE_GPIO 配置,关闭 BSP_USE_QSPI 配置,打开 rt-thread 的 SFUD 调试开关
- 编译 rt-thread,加载版本启动,启动后显示 spi flash probe 成功
- 执行 sf 基本操作,read, write, erase
推荐指令
-
sf probe S25FS256
-
sf read 0x1FFF000 16
-
sf write 0x1FFF000 16 25 68 78 95 15 75 20
-
sf read 0x1FFF000 16
-
sf erase 0x1FFF000 16
can 测试
-
使用 scons menuconfig 选中 Enable Can
-
然后选中 Enable can0 ,Enable can0 work in loop back
-
烧录程序并且烧录
-
打开 can 盒,将波特率设为 1000000
-
然后通过 can 盒发送对应的数据(标准帧,扩展帧),就可以看见回复同样的内容
6. 参考资源
-
ARM Architecture Reference Manual
-
FT-2000/4 软件编程手册-V1.4
7. 联系人信息
请联系飞腾嵌入式软件部