更新驱动代码,完成对新版rt-thread内核的支持工作。更新默认config文件,保证各驱动被顺利添加后,程序能正常运行 |
||
|---|---|---|
| .. | ||
| aarch32 | ||
| aarch64 | ||
| board | ||
| doc | ||
| figures | ||
| libraries | ||
| tools/figures | ||
| .gitignore | ||
| README.md | ||
README.md
PHYTIUM BSP 说明
简介
本文档为基于 RT-THREAD 的 Phytium 系列 CPU 相关 BSP 说明。
本文的主要内容如下:
- BSP 简介
- 移植支持情况
- 如何在 Ubuntu/Windows 环境下使用此 BSP
- 如何进行编译与实验
- 维护人信息
- 注意事项
BSP简介
-
飞腾芯片产品具有谱系全、性能高、生态完善、自主化程度高等特点,目前主要包括高性能服务器CPU(飞腾腾云S系列)、高效能桌面CPU(飞腾腾锐D系列)、高端嵌入式CPU(飞腾腾珑E系列)和飞腾套片四大系列,为从端到云的各型设备提供核心算力支撑。
-
本BSP目前支持飞腾派、飞腾腾锐D系列、飞腾腾珑E系列 相关CPU, 基于 Phytium-Standalone-SDK 进行开发。开发者能够使用
-
本BSP 支持Phytium系列CPU 工作在 aarch32/aarch64 两种执行状态 ,开发者能够根据自己的应用场景灵活选择CPU 工作状态。
移植支持情况
| 片上外设 | 支持情况 | 备注 |
|---|---|---|
| UART | 支持 | UART1 打印输出 |
| GPIO | 支持 | GPIO 引脚电平输入输出,中断 |
| XMAC | 支持 | XMAC 网卡初始化和运行 |
| SDMMC | 支持 | SD0/SD1 读写 SD 卡或 eMMC 颗粒 |
| PWM | 支持 | PWM 脉宽调制电压输出 |
| CAN | 支持 | CAN/CANFD设备通信 |
| I2C | 支持 | I2C设备通信 |
| SPI | 支持 | SPI设备通信 |
| 芯片 | 支持情况 | 备注 |
|---|---|---|
| Phytium PI | 支持 | 支持SMP |
| E2000D | 支持 | 支持SMP |
| E2000Q | 支持 | 支持SMP |
| E2000S | 支持 |
- Phytium PI 上使用 RT-Thread 要注意读写操作不能影响 SD 卡的固件,具体使用方法可以参考
如何在Ubuntu/Windows 环境下使用此BSP
Ubuntu 环境
- 根据 Linux x86_64 SDK安装方法 中1.1 - 1.2 节中介绍,先安装 SDK 编译环境
- 参考RT-Thread/env 中Tutorial 在ubuntu 环境下安装 env 环境
- 在编译环境下执行
source ~/.env/env.sh - 以aarch32 执行状态为例,
cd bsp/phytium/aarch32
Windows 环境
- 根据Windows 10 SDK安装方法,安装 SDK 编译环境,编辑新建 Windows 环境变量 AARCH32_CROSS_PATH 和 AARCH64_CROSS_PATH
- 参考RT-Thread/env 中Tutorial 在 Windows 环境下解压 env 压缩包
- 以aarch32 执行状态为例,
cd bsp/phytium/aarch32 - 使用 export_project.py 导出 BSP 工程到其他目录进行开发
- 使用 RT-Studio 导入 BSP 工程进行开发
如何添加开发板
如何进行编译与实验
编译说明
烧写及执行
Ubuntu 环境配置 tftp 服务
- 在开发环境
host侧安装tftp服务
sudo apt-get install tftp-hpa tftpd-hpa
sudo apt-get install xinetd
-
新建 tftboot 目录, 以
/mnt/d/tftboot为例, 此目录应与项目编译脚本makefile中的USR_BOOT_DIR一致, 并确保 tftboot 目录有执行权限chmod 777 /**/tftboot -
配置主机 tftpboot 服务, 新建并配置文件
/etc/xinetd.d/tftp
# /etc/xinetd.d/tftp
server tftp
{
socket_type = dgram
protocol = udp
wait = yes
user = root
server = /usr/sbin/in.tftpd
server_args = -s /mnt/d/tftboot
disable = no
per_source = 11
cps = 100 2
flags = IPv4
}
- 启动主机
tftp服务,生成默认配置
$ sudo service tftpd-hpa start
- 修改主机
tftp配置,指向tftboot目录 修改/etc/default/tftpd-hpa
$ sudo nano /etc/default/tftpd-hpa
# /etc/default/tftpd-hpa
TFTP_USERNAME="tftp"
TFTP_DIRECTORY="/mnt/d/tftboot"
TFTP_ADDRESS=":69"
TFTP_OPTIONS="-l -c -s"
- 重启主机
tftp服务
$ sudo service tftpd-hpa restart
- 测试主机
tftp服务的可用性登录
tftp服务,获取tftboot目录下的一个文件
$ tftp 192.168.4.50
tftp> get test1234
tftp> q
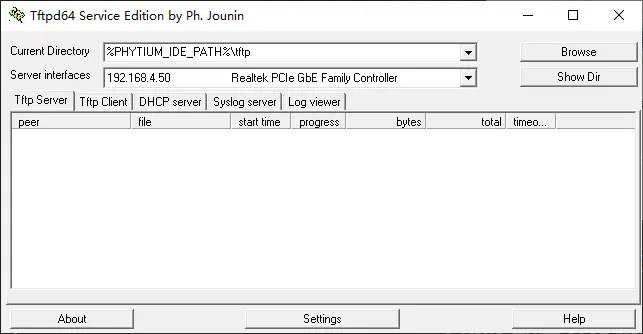
Windows环境下配置 tftp 服务
- 下载Tftpd64 工具 ,并安装Tftpd64 工具
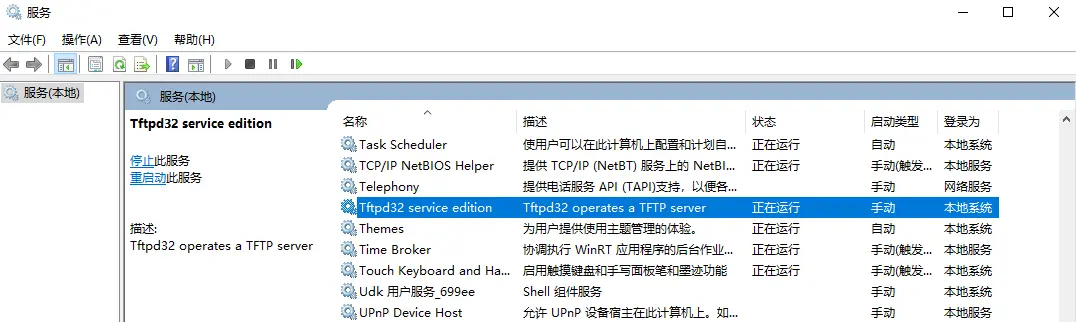
- 之后每次使用前,进入Windows服务,手动将一下服务打开
格式化 SD 卡
-
RT-Smart 依赖 SD 卡挂载为 / 目录,要保证插入的卡格式为 FAT32,否则会提示初始化失败的信息
-
Phytium PI 固件可能在 SD 卡中,这种情况下需要将 SD 卡分成两个区,第一个分区格式为 RAW 放置固件,第二个分区格式为 FAT32 作为 RT-Thread/RT-Smart 的根目录使用,在编译镜像时,需要调整 CONFIG_SDCARD_OFFSET 配置,避免读写操作影响固件
利用 uboot 上tftp 服务加载镜像
-
进入
u-boot界面,输入如下指令,配置开发板ip,host侧ip和网关地址setenv ipaddr 192.168.4.20 setenv serverip 192.168.4.50 setenv gatewayip 192.168.4.1 -
将编译好的elf 或者bin 文件拷贝至Tftpd64所设置文件夹下
-
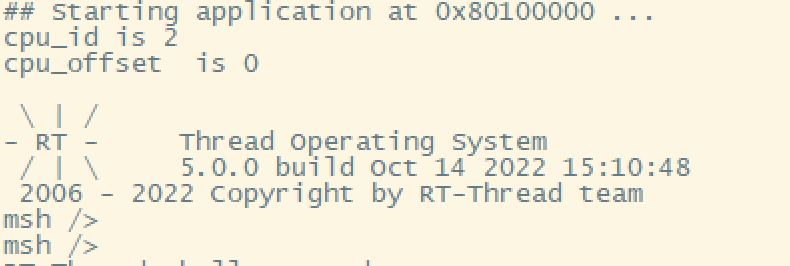
随后烧录的文件到开发板,输入以下指令
tftpboot 0x80080000 rtthread.bin go 0x80080000
运行结果
维护人信息
- huanghe: huanghe@phytium.com.cn
- zhugengyu: zhugengyu@phytium.com.cn