ES-PDS-ES32F0654 开发板 BSP 说明
标签: EastSoft、国产MCU、Cortex-M0、ES32F0654LT
1. 简介
本文档为上海东软载波微电子开发团队为 ES-PDS-ES32F0654 开发板提供的 BSP (板级支持包) 说明。 通过阅读本文档,开发者可以快速地上手该 BSP,将 RT-Thread 运行在开发板上。
1.1 开发板介绍
主要内容如下: ES-PDS-ES32F0654 是东软载波微电子官方推出的一款基于 ARM Cortex-M0 内核的开发板,最高主频为 48MHz,可满足基础功能测试及高端功能扩展等开发需求。
开发板外观如下图所示:
ES-PDS-ES32F0654-V1.1
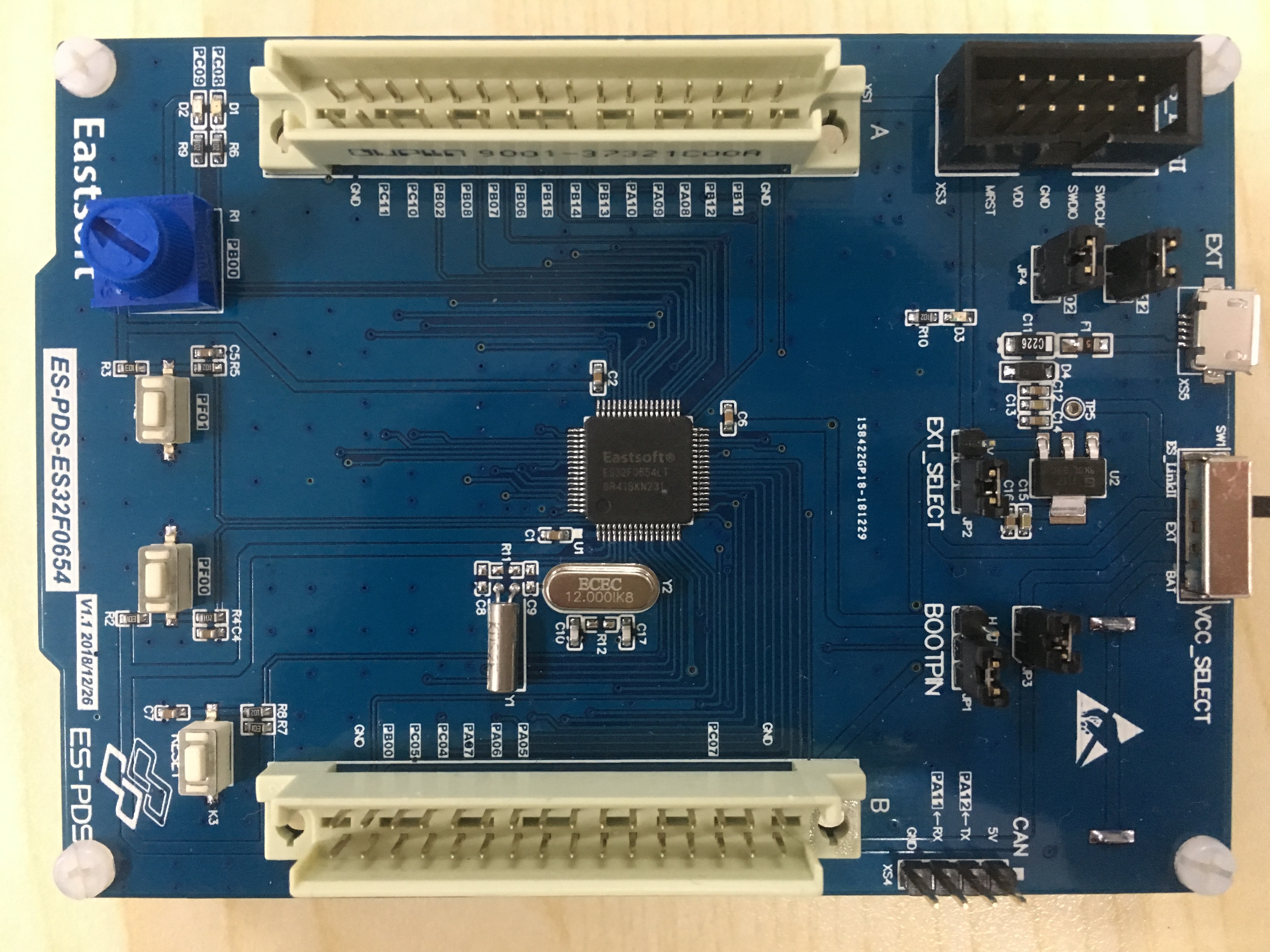
该开发板常用 板载资源 如下:
- MCU:ES32F0654LT,主频 48MHz,32KB SRAM,256KB FLASH,54 GPIOs
- 外部模块:SPI FLASH (MX25L64,8MB)、I2C EEPROM (M24C04,512B)
- 常用外设
- 可调电阻:1个,(PB00)
- LED:2个,(PC8/PC9)
- 按键:3个,K1(PF00),K2(PF01),RESET(MRST)
- 常用接口:GPIO、UART、SPI、I2C
- 调试接口,ESLinkⅡ(EastSoft 官方推出的开发工具,有标准版和mini版两种版本,均自带 CDC 串口功能) SWD 下载
外设支持:
本 BSP 目前对外设的支持情况如下:
| 板载外设 | 支持情况 | 备注 |
|---|---|---|
| SPI FLASH | 支持 | SPI0 |
| 片上外设 | 支持情况 | 备注 |
| GPIO | 支持 | 54 GPIOs |
| UART | 支持 | UART0/1/2/3 |
| SPI | 支持 | SPI0/1 |
| I2C | 支持 | I2C0/1 |
| PWM | 支持 | PWM0/1/2/3 |
| TIMER | 支持 | TIMER0/1/2/3 |
| RTC | 支持 | RTC |
1.2 注意事项
- 本BSP中,UART2和TIMER1不能同时使用,UART3和TIMER2不能同时使用
更多详细信息请咨询上海东软载波微电子技术支持
2. 快速上手
本 BSP 为开发者提供 MDK5 工程。下面以 MDK5 开发环境为例,介绍如何将系统运行起来。
硬件连接
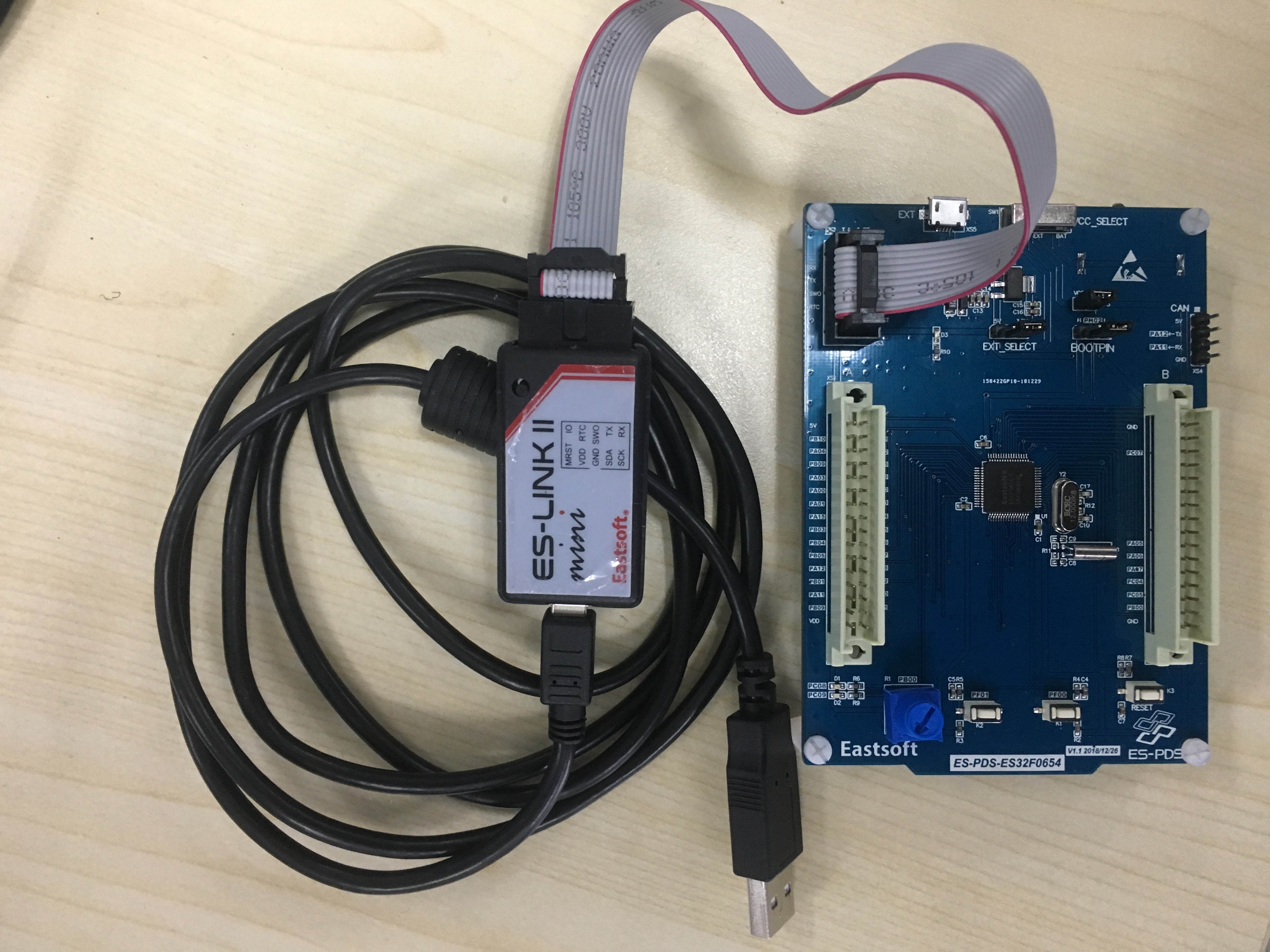
使用 ESLinkⅡ (自带 CDC 串口)或 Jlink 等调试工具连接开发板到 PC,拨动开关选择使用调试工具供电或使用外部电源供电。若使用 Jlink 等调试工具,还需要将 UART2_TX(PC12)、UART2_RX(PD2)、GND 接到串口工具上。
使用ESlinkⅡ(mini)连接开发板如下图所示:
ESLinkⅡ(mini) + ES-PDS-ES32F0654-V1.1
编译下载
双击 project.uvprojx 文件,打开 MDK5 工程,工程默认配置使用 JLink 下载程序,在通过 JLink 连接开发板的基础上,点击下载按钮即可下载程序到开发板,如果使用 ESLinkⅡ,则选择 "CMSIS-DAP Debugger",连接正常后即可编译并下载程序到开发板。
运行结果
下载程序成功之后,系统会自动运行,观察串口输出的信息,同时开发板LED闪烁。
\ | /
- RT - Thread Operating System
/ | \ 4.0.0 build Jan 28 2019
2006 - 2018 Copyright by rt-thread team
msh >
3. 进阶使用
此 BSP 默认只开启了 GPIO 和 uart2 的功能,如果需使用 Flash 等更多高级功能,需要利用 ENV 工具对 BSP 进行配置,步骤如下:
-
在 bsp 下打开 env 工具。
-
输入
menuconfig命令配置工程,配置好之后保存退出。 -
输入
pkgs --update命令更新软件包。 -
输入
scons --target=mdk5/iar命令重新生成工程。
更多 Env 工具的详细介绍请参考 RT-Thread 文档中心