# The Arduino Compatible for STM32F469 Discovery Board
**English** | [中文](README_zh.md)
## 1 RTduino - Arduino Ecosystem Compatibility Layer for RT-Thread
STM32F469 Discovery board has support [RTduino](https://github.com/RTduino/RTduino). Users can use Arduino APIs, third party libraries and programming method to program on the board.
### 1.1 How to Enable RTduino
Please go to the [RTduino repository](https://github.com/RTduino/RTduino) to see the details.
```Kconfig
Hardware Drivers Config --->
Onboard Peripheral Drivers --->
[*] Compatible with Arduino Ecosystem (RTduino)
```
## 2 Arduino Pinout
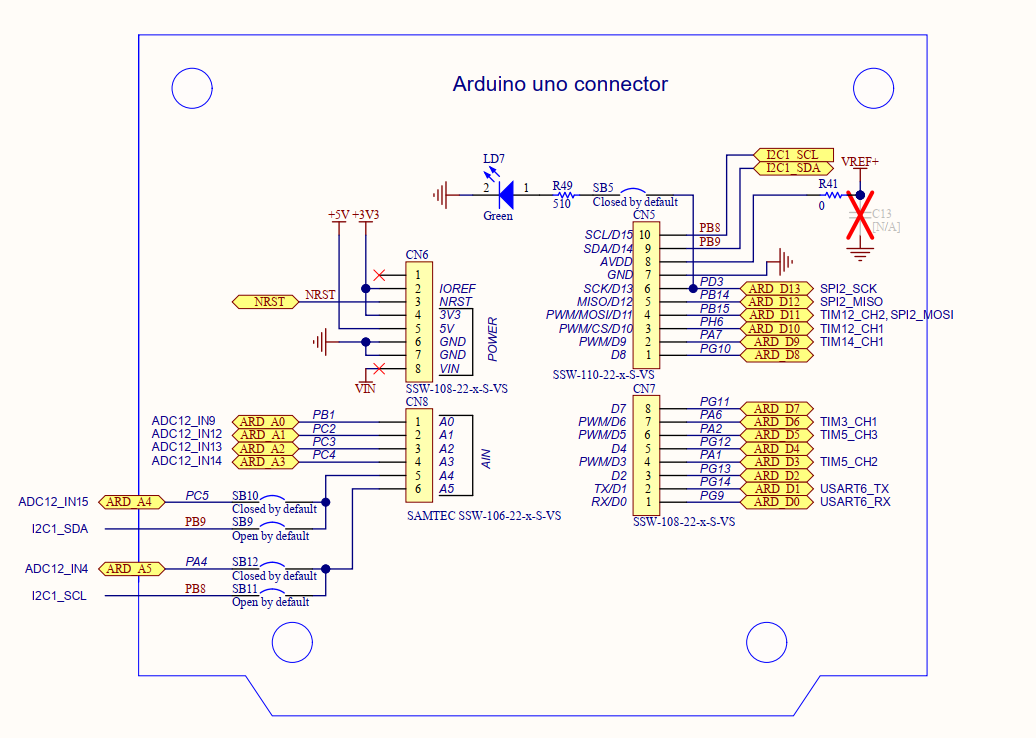
This board complies with Arduino UNO pins layout. For more details, please take a look at: [pins_arduino.c](pins_arduino.c) and [pins_arduino.h](pins_arduino.h).
| Arduino Pin | STM32 Pin | 5V Tolerate | Note |
| --------------------- | --------- | ----------- | --------------------------------------------------------------------------------------------- |
| 0 (D0) | PG9 | Yes | Serial-Rx. Token over by RT-Thread UART device by default |
| 1 (D1) | PG14 | Yes | Serial-Tx. Token over by RT-Thread UART device by default |
| 2 (D2) | PG13 | Yes | |
| 3 (D3) | PA1 | Yes | PWM2-CH2. Token over by RT-Thread PWM device by default |
| 4 (D4) | PG12 | Yes | |
| 5 (D5) | PA2 | Yes | PWM2-CH3. Token over by RT-Thread PWM device by default |
| 6 (D6) | PA6 | Yes | PWM3-CH1. Token over by RT-Thread PWM device by default |
| 7 (D7) | PG11 | Yes | |
| 8 (D8) | PG10 | Yes | |
| 9 (D9) | PA7 | Yes | PWM3-CH2. Token over by RT-Thread PWM device by default |
| 10 (D10) | PH6 | Yes | PWM12-CH1. Token over by RT-Thread PWM device by default |
| 11 (D11) | PB15 | Yes | PWM12-CH2. Token over by RT-Thread PWM device by default |
| 12 (D12) | PB14 | Yes | |
| 13 (D13, LED_BUILTIN) | PD3 | Yes | USER LED1 |
| 14 (D14) | PB9 | Yes | I2C-SDA. Token over by RT-Thread I2C device by default |
| 15 (D15) | PB8 | Yes | I2C-SCL. Token over by RT-Thread I2C device by default |
| 16 (D16) | PA0 | Yes | USER Button |
| 17(D17) | PG6 | Yes | USER LED2 |
| 18(D18) | PD4 | Yes | USER LED3 |
| 19(D19) | PD5 | Yes | USER LED4 |
| 20(D20) | PK3 | Yes | USER LED5 |
| A0 | PB1 | Yes | ADC1-CH9. Token over by RT-Thread ADC device by default |
| A1 | PC2 | Yes | ADC1-CH12. Token over by RT-Thread ADC device by default |
| A2 | PC3 | Yes | ADC1-CH13. Token over by RT-Thread ADC device by default |
| A3 | PC4 | Yes | ADC1-CH14. Token over by RT-Thread ADC device by default |
| A4 | PC5 | Yes | ADC1-CH15. Token over by RT-Thread ADC device by default |
| A5 | PA4 | Yes | ADC1-CH4. Token over by RT-Thread ADC device by default |
| A6 | -- | | On-chip internal voltage sensor. ADC1-CH17. Token over by RT-Thread ADC device by default |
| A7 | -- | | On-chip internal temperature sensor. ADC1-CH16. Token over by RT-Thread ADC device by default |
> Notice:
>
> 1. Don't use a same hardware timer to drive PWM (analogRead) and servos at same time, because hardware timers can only generate a same frequency for 4 PWM channels. Otherwise, it could cause a failure when drive servos.
> References
>
> 1. [STM32F469 Discovery ST Website](https://www.st.com/en/evaluation-tools/32f469idiscovery.html#documentation)
## 3 Communication
### 3.1 I2C Bus
I2C bus is `SCL/D15` and `SDA/D14` pins. Users can directly include the `#include <Wire.h>`, which is the Arduino official I2C header file, to use the I2C bus.
### 3.2 SPI Bus
This board doesn't support Arduino SPI header file and functions.
### 3.3 Serial
This board supports to use `Serial.` method to operate `uart3` device. See [example](https://github.com/RTduino/RTduino/blob/master/examples/Basic/helloworld.cpp).
### 3.4 USB Virtual Serial
This board supports USB virtual serial. See [example](https://github.com/RTduino/RTduino/tree/master/examples/USBSerial). You may enable it if is needed.
```Kconfig
RT-Thread online packages --->
Arduino libraries --->
[*] RTduino: Arduino Ecological Compatibility Layer
[*] Enable USB Serial
```