# i.MX RT1052 EVK Pro 开发板 BSP 说明
## 简介
本文档为 RT-Thread 开发团队为野火 i.MX RT1052 EVK Pro 开发板提供的 BSP (板级支持包) 说明。
主要内容如下:
- 开发板资源介绍
- BSP 快速上手
- 进阶使用方法
通过阅读快速上手章节开发者可以快速地上手该 BSP,将 RT-Thread 运行在开发板上。在进阶使用指南章节,将会介绍更多高级功能,帮助开发者利用 RT-Thread 驱动更多板载资源。
## 开发板介绍
i.MX RT1052 EVK Pro 是野火推出的一款基于 ARM Cortex-M7 内核的开发板,最高主频为 600Mhz,该开发板具有丰富的板载资源,可以充分发挥 RT1052 的芯片性能。
开发板外观如下图所示:

该开发板常用**板载资源**如下:
- MCU:i.MX RT1052,主频 600MHz
- 存储:32MB SDRAM、128MB NANDFLASH、32MB QSPI FLASH、2Kb EEPROM
- 常用外设
- 陀螺仪:MPU6050
- 光强传感器:AP3216C
- LED:RGB 彩灯
- 常用接口:USB 转串口、SD 卡接口、以太网接口、LCD 接口、摄像头接口
- 调试接口:标准 JTAG/SWD
开发板更多详细信息请参考野火 [i.MX RT1052 EVK Pro 开发板介绍](https://fire-stm32.taobao.com/index.htm)。
## 外设支持
本 BSP 目前对外设的支持情况如下:
| **板载外设** | **支持情况** | **备注** |
| :----------------- | :----------: | :------------------------------------- |
| USB 转串口 | 支持 | |
| RS232 | 支持 | UART2|
| RS485 | 支持 | UART5 |
| RGB | 支持 | |
| MPU6050 | 支持 | I2C1 |
| AP3216C | 支持 | I2C1 |
| EEPROM | 支持 | I2C1 |
| **片上外设** | **支持情况** | **备注** |
| GPIO | 支持 | |
| UART | 支持 | UART1 |
| I2C | 支持 | |
| RTC | 支持 | |
| WDT | 支持 | |
| PWM | 支持 | |
| GPT | 支持 | |
| CAN | 支持 | CAN1 |
## Keil IDE 使用说明
使用说明分为如下两个章节:
- 快速上手
本章节是为刚接触 RT-Thread 的新手准备的使用说明,遵循简单的步骤即可将 RT-Thread 操作系统运行在该开发板上,看到实验效果 。
- 进阶使用
本章节是为需要在 RT-Thread 操作系统上使用更多开发板资源的开发者准备的。通过使用 ENV 工具对 BSP 进行配置,可以开启更多板载资源,实现更多高级功能。
### 快速上手
本 BSP 为开发者提供 MDK5 和 IAR 工程,并且支持 GCC 开发环境。下面以 MDK5 开发环境为例,介绍如何将系统运行起来。
#### 硬件连接
使用数据线连接开发板到 PC,打开电源开关。
#### 编译下载
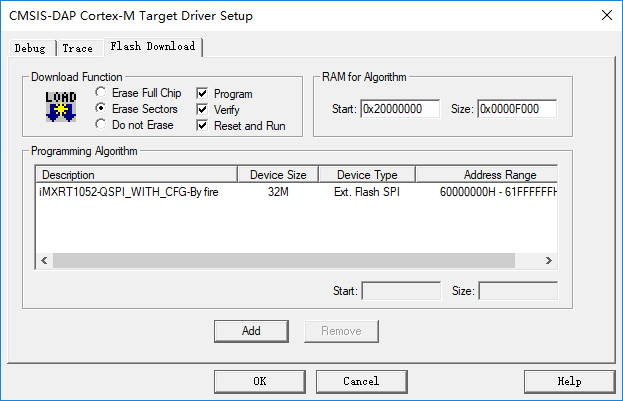
首先需要将需要将 RT1052 的 FLASH 下载算法(board目录下的MIMXRT105x_QuadSPI_4KB_SEC.FLM 文件)拷贝到 MDK 安装路径→ARM→Flash文件夹里面。双击 project.uvprojx 文件,打开 MDK5 工程,按照下图所示选择下载算法并保存设置:
编译工程,工程默认配置使用 CMSIS-DAP 下载程序,在通过 CMSIS-DAP 连接开发板的基础上,点击下载按钮即可下载程序到开发板
#### 运行结果
下载程序成功之后,系统会自动运行,观察开发板上 LED 的运行效果,蓝色 LED 会周期性闪烁。
连接开发板对应串口到 PC , 在终端工具里打开相应的串口(115200-8-1-N),复位设备后,可以看到 RT-Thread 的输出信息:
```bash
\ | /
- RT - Thread Operating System
/ | \ 4.0.1 build May 5 2019
2006 - 2019 Copyright by rt-thread team
msh >
```
### 进阶使用
此 BSP 默认只开启了 GPIO 和 串口 1 的功能,如果需使用 MPU6050 等更多高级外设功能,需要利用 ENV 工具对 BSP 进行配置,步骤如下:
1. 在 bsp 下打开 env 工具。
2. 输入 `menuconfig` 命令配置工程,配置好之后保存退出。
3. 输入 `pkgs --update` 命令更新软件包。
4. 输入 `scons --target=mdk4/mdk5/iar` 命令重新生成工程。
本章节更多详细的介绍请参考 [IMXRT系列BSP外设驱动使用教程](../docs/IMXRT系列BSP外设驱动使用教程.md)。
## RT-Thread Studio 使用说明
### 导入工程
* 首选在 `RT-Thread Studio` 中点击导入工程,选择 `RT-Thread Bsp` 到工作空间中。
<img src="figures/1.png" style="zoom:80%;" />
* 选择 `imxrt1052-fire-pro` 目录作为Bsp根目录
<img src="figures/2.png" style="zoom: 67%;" />
* 为本工程起个别名,作为本项目的工程名称
<img src="figures/3.png" style="zoom:80%;" />
### 下载配置
> 这里使用 `jlink` 下载方式作为参考
* 将 `imxrt1052-fire-pro\board\JLink_Vxxx` 路径下的全部文件拷贝
<img src="figures/4.png" style="zoom:80%;" />
* 覆盖到 `RT-Thread Studio` 安装目录下 `repo\Extract\Debugger_Support_Packages\SEGGER\J-Link\JLink_Vxxx` 目录即可
<img src="figures/5.png" style="zoom: 67%;" />
### 编译下载
* 点击编译按钮,进行工程编译
<img src="figures/6.png" style="zoom: 67%;" />
* 然后选择下载按钮,进行代码的烧录
<img src="figures/7.png" style="zoom: 67%;" />
* 当出现如下提示,恭喜你已经烧录成功
<img src="figures/8.png" style="zoom: 67%;" />
* 打开串口软件,选择好对应串口、波特率,按下开发板的复位按键,输出以下信息:
<img src="figures/9.png" style="zoom: 67%;" />
## 注意事项
暂无
## 联系人信息
维护人:
- [tyustli](https://github.com/tyustli)