# GD32系列驱动介绍 在 RT-Thread 实时操作系统中,各种各样的设备驱动是通过一套 I/O 设备管理框架来管理的。设备管理框架给上层应用提供了一套标准的设备操作 API,开发者通过调用这些标准设备操作 API,可以高效地完成和底层硬件外设的交互。设备管理框架的结构如下图所示: 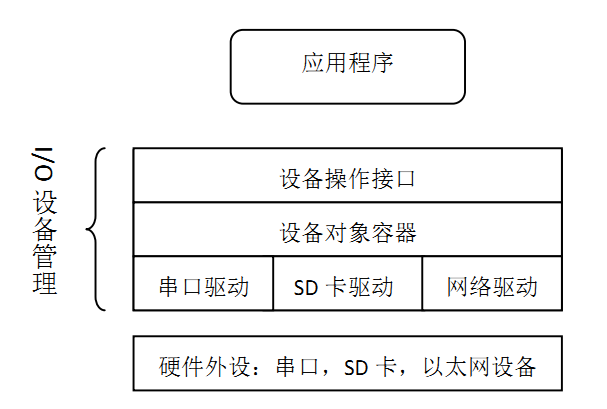 使用 I/O 设备管理框架开发应用程序,有如下优点: - 使用同一套标准的 API 开发应用程序,使应用程序具有更好的移植性 - 底层驱动的升级和修改不会影响到上层代码 - 驱动和应用程序相互独立,方便多个开发者协同开发 ## 1. 驱动分类介绍 本小节介绍 BSP 提供的不同类别驱动的概念,对一个 BSP 而言,有如下三类驱动: - **板载外设驱动**:指 MCU 之外,开发板上外设,例如 TF 卡、以太网和 LCD 等 - **片上外设驱动**:指 MCU 芯片上的外设,例如硬件定时器、ADC 和看门狗等 - **扩展模块驱动**:指可以通过扩展接口或者杜邦线连接的开发板的模块,例如 ESP8266 模块 这三种外设的示意图如下所示: 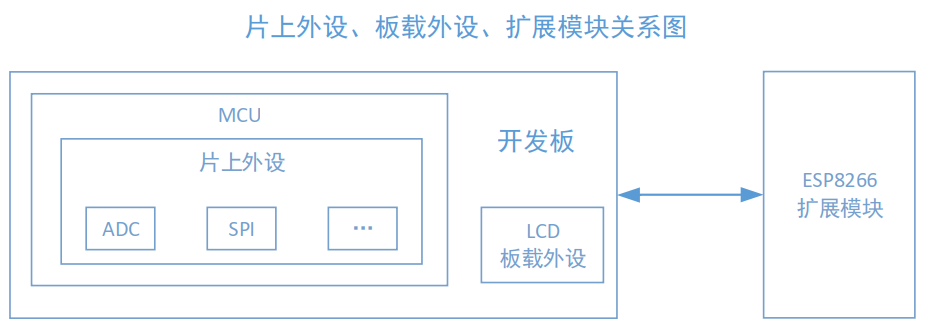 ## 2. 外设驱动的使用方法 点击下表中的驱动名称,即可跳转到对应驱动框架的介绍文档。开发者可以通过阅读相关资料,了解如何在应用开发中通过设备驱动框架来使用这些外设驱动。 ### 2.1 片上外设 | 序号 | 驱动 | 简介 | | ---- | ------------------------------------------------------------ | ------------------------------------------------ | | 1 | [GPIO](https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/pin/pin.md) | 操作 GPIO 管脚 | | 2 | [UART](https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/uart/uart_v1/uart) | 通过串口收发数据 | | 3 | [soft I2C](https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/i2c/i2c.md) | 通过软件 I2C 收发数据 | | 4 | [SPI](https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/spi/spi) | 通过 SPI 收发数据 | | 5 | [ADC](https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/adc/adc.md) | 测量管脚上的模拟量 | | 6 | SDIO | 通过 SDIO 读写数据 | | 7 | [TIMER](https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/hwtimer/hwtimer.md) | 使用硬件定时器实现测量时间和定时执行回调函数功能 | | 8 | [PWM](https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/pwm/pwm.md) | 在特定的管脚输出 PWM 波形 | | 9 | [RTC](https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/rtc/rtc.md) | 设置和读取时间 | | 10 | [WDT](https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/watchdog/watchdog.md) | 看门狗驱动 | | 11 | [QSPI](https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/programming-manual/device/spi/spi.md) | 通过 SPI(1、2、4线) 收发数据 | ### 2.2 板载外设 | 序号 | 驱动 | 简介 | | ---- | ------- | --------------------------------------- | | 1 | SD | 适用于 SPI 接口或 SDIO 接口的 SD(TF) 卡 | | 2 | ETH PHY | 以太网 | | 3 | USB PHY | USB | | 4 | LCD | 显示屏 | ### 2.3 扩展模块 | 序号 | 驱动 | 简介 | | ---- | -------- | ---------------------- | | 1 | ESP8266 | 串口转 WIFI 模块 | | 2 | ENC28J60 | SPI 接口的以太网控制器 | ### 2.4 驱动示例代码 在 RT-Thread 的 `examples\test` 目录下,有 RT-Thread 提供的基于不同外设驱动的示例代码。在 env 工具中开启 BSP 中要测试的驱动,并将 `examples\test` 中对应的驱动框架测试文件加入工程,即可快速测试 BSP 中提供的驱动。