|
|
||
|---|---|---|
| .. | ||
| .vscode | ||
| applications | ||
| board | ||
| .config | ||
| .gitignore | ||
| Kconfig | ||
| README.md | ||
| SConscript | ||
| SConstruct | ||
| project.uvoptx | ||
| project.uvprojx | ||
| rtconfig.h | ||
| rtconfig.py | ||
| template.uvoptx | ||
| template.uvprojx | ||
README.md
nRF52832-PCA10040 BSP说明
简介
该文件夹主要存放所有主芯片为nRF52832的板级支持包。目前默认支持的开发板是官方PCA10040 主要内容如下:
- 开发板资源介绍
- 进阶使用方法
开发板介绍
PCA10040-nRF52832是Nordic 官方的开发板,搭载nRF52832 芯片,基于ARM Cortex-M4内核,最高主频64 MHz,具有丰富的资源。
开发板外观如下图所示
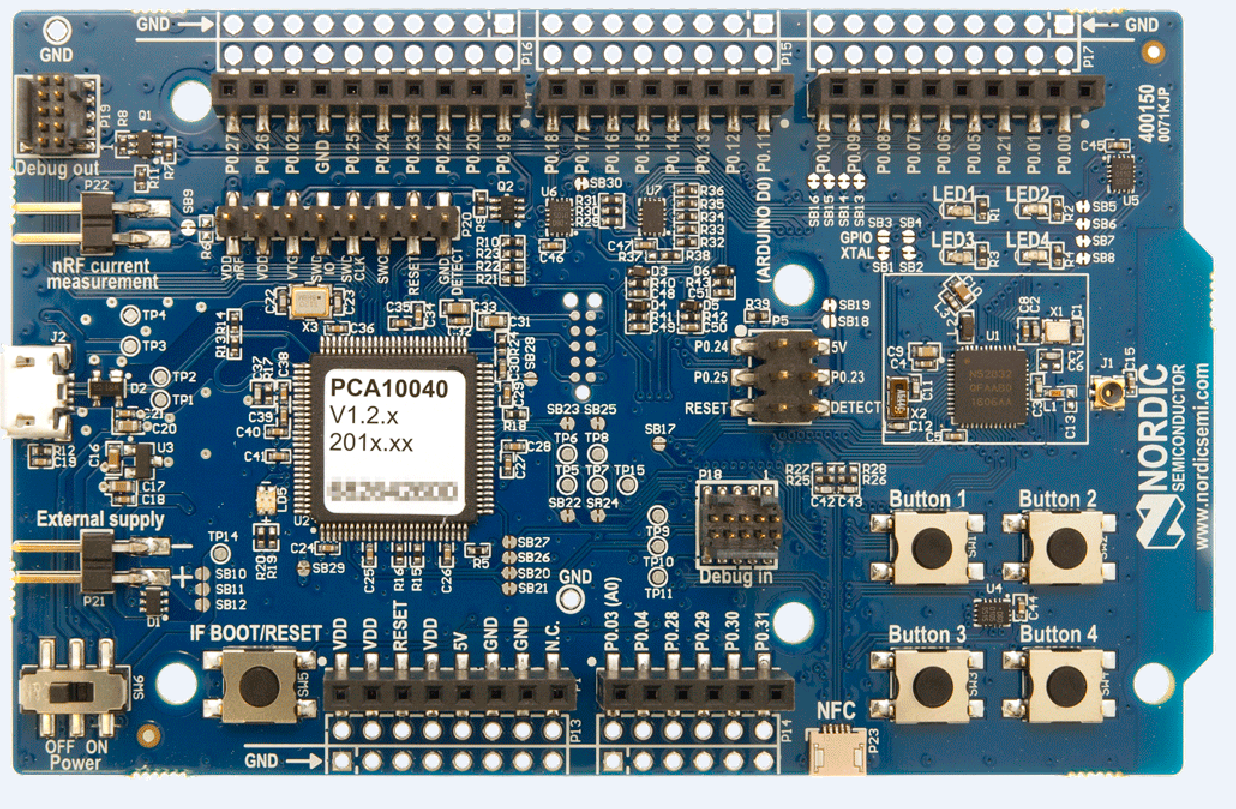
PCA10040-nrf52832开发板常用 板载资源 如下:
- MCU:NRF52832,主频 64MHz,512kB FLASH ,64kB RAM
- MCU 外设: GPIO, UART, SPI, I2C(TWI), RTC,TIMER,NFC,PWM,ADC
- 板载设
- LED:4个 。
- 按键:5个,4个USER and 1个RESET 。
- 常用接口:Arduino Uno 接口
- 调试接口:板载 J-LINK 调试器。
开发板更多详细信息请参考NORDIC官方PCA10040
外设支持
本 BSP 目前对外设的支持情况如下:
| 片上外设 | 支持情况 | 备注 |
|---|---|---|
| GPIO | 支持 | GPION |
| UART | 支持 | UART0 |
| PWM | 支持 | 支持 |
| SPI | 支持 | 支持 |
| RTC | 支持 | |
| ADC | 支持 | |
| TIMER | 支持 | TIMER0~TIMER4 |
进阶使用
此 BSP 默认只开启了 GPIO 和 串口 0 的功能,更多高级功能需要利用 env 工具对 BSP 进行配置,步骤如下:
-
在 bsp 下打开 env 工具。
-
输入
menuconfig命令配置工程,配置好之后保存退出。 -
输入
pkgs --update命令更新软件包。 -
输入
scons --target=mdk4/mdk5/iar命令重新生成工程。
VS Code开发支持
配置步骤:
-
在命令行设置以下两个环境变量:
export RTT_CC=gcc export RTT_EXEC_PATH=<工具链路径/bin> -
搜索插件
Cortex-debug并安装。 -
安装nRF Command Line Tools以支持
nrfjprog命令。 -
在.vscode/settings.json内配置工具链和
JlinkGDBServer,sample:{ "cortex-debug.armToolchainPath": "/usr/local/gcc-arm-none-eabi-9-2019-q4-major/bin/", "cortex-debug.armToolchainPrefix": "arm-none-eabi", "cortex-debug.JLinkGDBServerPath": "/Applications/SEGGER/JLink/JLinkGDBServer" } -
点击
终端->运行任务->build编译,点击终端->运行任务->flash烧录,点击左侧debug->run使用VS Code进行debug。
支持其他开发板
客户可以将自己的开发板的.config文件和board/Kconfig文件到board/$(board_name)下面添加README.md即可
注意事项
联系人信息
维护人: