|
|
||
|---|---|---|
| .. | ||
| .vscode | ||
| drivers | ||
| images | ||
| main | ||
| .config | ||
| CMakeLists.txt | ||
| Kconfig | ||
| Makefile | ||
| README.md | ||
| README_ZH.md | ||
| SConscript | ||
| SConstruct | ||
| rtconfig.h | ||
| rtconfig.py | ||
| rtt.patch | ||
| sdkconfig | ||
README.md
ESP32-C3 BSP Introduction
中文 | English
This document records the execution instruction of the BSP (board support package) for the ESP32-C3 development board.
The document is covered in two parts:
- Board Resources Introduction
- Quickly Get Started
Resources Introduction
We tested 2 development boards, it all works, but due to the different LED pins of the two development boards, so we'll need to select the corresponding development board in the menuconfig.
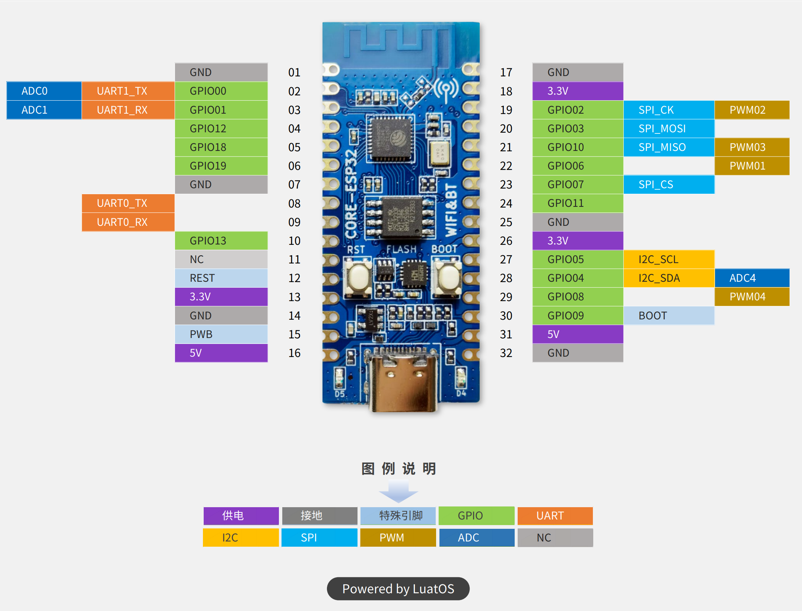
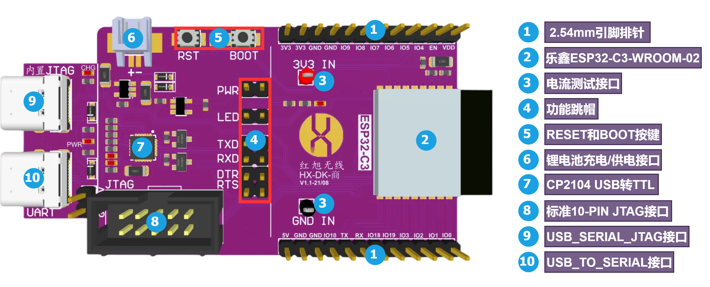
The mainly-used resources of LUATOS_ESP32C3 are shown as follows:
- MCU: esp32-c3,Main Frequency 160MHz, 407.22 CoreMark; 2.55 CoreMark/MHz
- Built-in Chip: 384KB ROM, 400KB SRAM
- Peripherals
- Red LED: 2, LED: D4 (IO12), D5(IO13)
- Button: 2, K1(BOOT) K2(RST)
- SPI FLASH: 4M
- Common-used interfaces: USB, UART, etc.
For more details about this board, please refer to Here.
Peripheral Condition
Each peripheral supporting condition for this BSP is as follows:
| On-board Peripherals | Support | Remark |
|---|---|---|
| GPIO | Support | |
| UART | Support | Using LUATOS_ESP32C3 development board requires connecting serial port to USB chip UART0_TX and UART0_RX (such as CP2102) |
| JTAG debug | Support | ESP32C3 usb-linked development boards can be debugged |
Install ESP-IDF
ESP-IDF can be installed in two ways
- Use Env tool
- Download the package
pkgs --update
- Install IDF tools. If you are using Linux or MacOS, go to ESP-IDF package directory and install IDF tools by running
cd packages/ESP-IDF-latest
./install.sh
If you are using Windows, open Command Prompt. Note that you cannot use any other terminals, such as the Env command line or PowerShell. Enter the BSP directory and run
install.bat
No matter what operating system you are using, this step only needs to be done once after the package is downloaded for the first time.
- Under the ESP-IDF package directory, export IDF environment variables. This commands need to be run every time when the BSP is built in a new terminal. If you are using Linux or MacOS, run
. export.sh
If you are using Windows, run
export.bat
Same as the previous step, you can only use Command Prompt.
- Apply patch to a local installation of ESP-IDF
- Select the below option with
SCons --menuconfig
Hardware Drivers Config
[*] Use local ESP-IDF installation
And deselect ESP-IDF package
RT-Thread online packages
peripheral libraries and drivers
[ ] ESP-IDF: Espressif IoT Development Framework
- Install FreeRTOS wrapper
pkgs --update
- Any convenient method to install ESP-IDF can be used, such as VSCode plugin. Make sure to install the master version of ESP-IDF.
- Enter the local ESP-IDF directory and run the following commands
git checkout 5c1044d84d625219eafa18c24758d9f0e4006b2c
# Replace rtt.patch with the actual directory of rtt.patch under the BSP directory
git am rtt.patch
- After applying the patch, ESP-IDF FreeRTOS projects can be compiled as usual
Compile and Upload
- Configure RT-Thread under the BSP directory
scons --menuconfig
- Whenever RT-Thread configuration is changed with
scons --menuconfig, a newCMakeLists.txtneeds to be generated with the command below
scons --target=esp-idf
- If ESP-IDf is installed using Env, use
idf.pyto compile and upload the program. Refer to Espressif official documents for reference. Note if you are using Windows, you can only useidf.pycommands in Windows Command Prompt. Otherwise follow the appropriate steps depending on how ESP-IDF was installed, such as using VSCode plugin. - Once the project is successfully downloaded, the system runs automatically, the red LED will blink in 1s on cycles.
Notes
- The basic functions are now supported, but it needs more, welcome any contributions and feedback.
Maintainer:
- supperthomas email address: 78900636@qq.com
- tangzz98 email address: tangz98@outlook.com
Special thanks to chenyingchun0312 for providing support on the RISC-V part working.