|
|
||
|---|---|---|
| .. | ||
| examples | ||
| picture | ||
| README.md | ||
| SConscript | ||
| pins_arduino.c | ||
| pins_arduino.h | ||
README.md
ES32F3696的Arduino生态兼容说明
1 RTduino - RT-Thread的Arduino生态兼容层
ES32F3696已经适配了RTduino软件包,可正常使用全部功能,包含GPIO/PWM及I2C/SPI通信接口。除标准arduino uno的接口外,该开发板还额外添加了4个led和一个方向键对应的GPIO,方便使用。更多信息,请参见RTduino软件包说明文档
1.1 使用Keil+Env
- Env 工具下敲入 menuconfig 命令,或者 RT-Thread Studio IDE 下选择 RT-Thread Settings:
Hardware Drivers Config --->
Onboard Peripheral Drivers --->
[*] Compatible with Arduino Ecosystem (RTduino)
- 进入RTduino配置,打开需要使用的各项配置 (SPI,I2C,Adafrui等)
RT-Thread online packages --->
system packages --->
RTduino: Arduino Ecological Compatibility Layer
- 使用 pkgs --update下载RTduino包
- 使用scons --target=mdk5生成代码
1.2 使用RT-Thread Studio
-
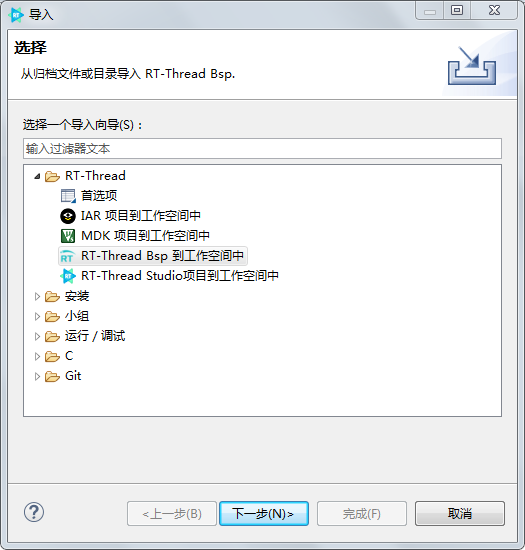
选择 文件 -> 导入 -> BSP导入
-
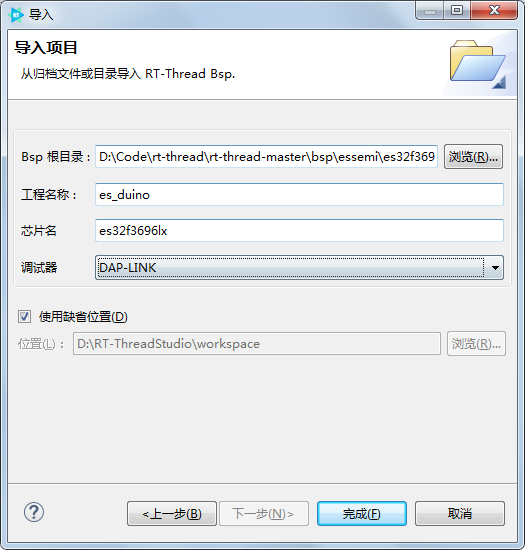
选择es32f369x的bsp路径,并填写工程名称、芯片名(es32f3696lx)
-
打开RT-Thread Settings,选择硬件,开启RTduino支持
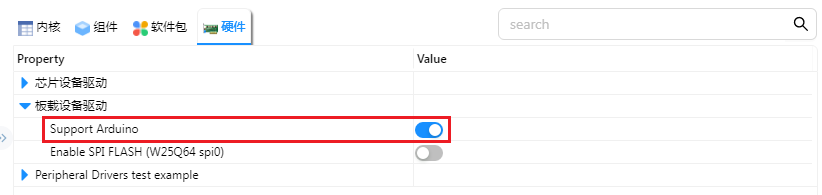
保存后稍等片刻,等待Studio下载库并完成配置
- 可能遇到的问题与解决方案
-
Unknown flag "-T"
项目->属性->C/C++构建->GNU ARM Cross C++ Linker -> General在右侧添加lds连接脚本
"${workspace_loc:/${ProjName}/drivers/linker_scripts/link.lds}"(需要先删除原有的再添加)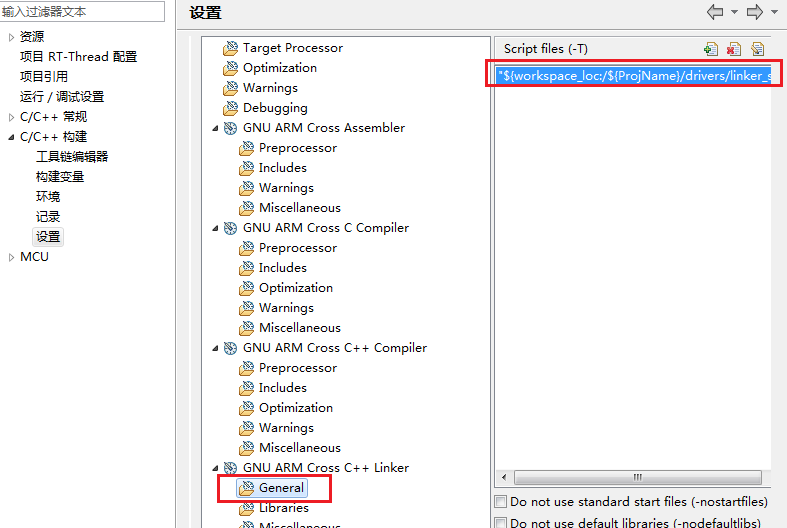
-
启动时直接进入Fault
选择 项目->属性->C/C++构建->GNU ARM Cross C++ Complier-> Miscellaneous ,在Other compiler flags 中添加
-mcpu=cortex-m3 -mthumb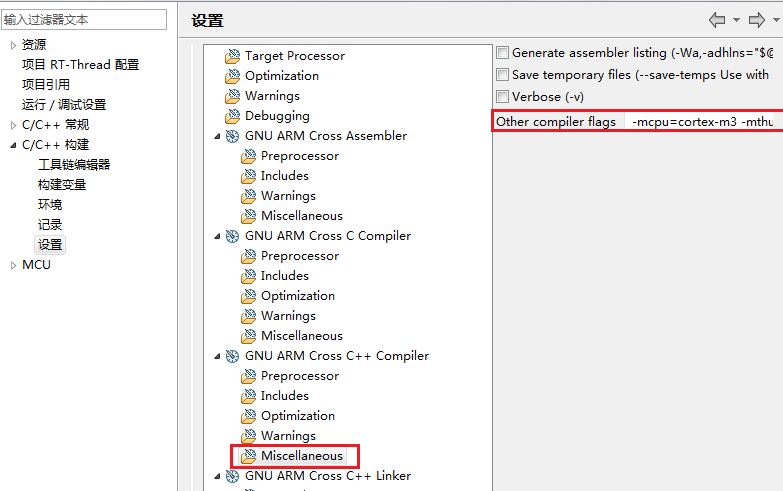
2 Arduino引脚排布
该BSP遵照Arduino UNO板的引脚排列方式,并额外扩展了一些LED和按键,更多引脚布局相关信息参见 pins_arduino.c 和 pins_arduino.h。
| Arduino引脚编号 | ES32引脚编号 | 备注 |
|---|---|---|
| D0 | PE3 | UART2 RX |
| D1 | PE2 | UART2 TX |
| D2 | PE4 | 普通IO |
| D3 | PA2 | PWM2 通道3 |
| D4 | PE5 | 普通IO |
| D5 | PA1 | PWM2 通道2 |
| D6 | PA0 | PWM2 通道1 |
| D7 | PE6 | 普通IO |
| D8 | PB8 | 普通IO |
| D9 | PB9 | 普通IO |
| D10 | PB0 | SPI片选/普通IO |
| D11 | PB5 | SPI1_MOSI/普通IO |
| D12 | PB4 | SPI1_MISO/普通IO |
| D13 | PD3 | SPI1_SCK/普通IO |
| D14 | PB7 | I2C0_SDA |
| D15 | PB6 | I2C0_SCL |
| D16 | PC8 | LED4 |
| D17 | PC12 | LED5 |
| D18 | PC7 | LED6 |
| D19 | PC6 | LED7 |
| D20 | PF1 | KEY_UP |
| D21 | PF4 | KEY_DOWN |
| D22 | PF6 | KEY_LEFT |
| D23 | PF0 | KEY_RIGHT |
| D24 | PF7 | KEY_CENTER |
| A0 | PC0 | ADC |
| A1 | PC1 | ADC |
| A2 | PC2 | ADC |
| A3 | PC3 | ADC |
| A4 | PA4 | ADC |
| A5 | PA5 | ADC |
3 I2C总线
ES32-Arduino支持的I2C总线是:i2c0。
I2C的引脚都是被RT-Thread I2C设备框架接管的,不需要直接操控这两个引脚,直接引用#include <Wire.h>(Arduino官方I2C头文件)即可使用。或者使用Adafruit_I2CDevice.h控制
4 SPI总线
ES32-Arduino的SPI总线是spi0总线, SCK、MISO、MOSI引脚是被RT-Thread SPI设备框架接管的,不需要直接操控这3个引脚,直接引用#include <SPI.h>(Arduino官方SPI头文件)即可使用。按照Arduino的编程标准,用户需要自行控制片选信号。或者使用Adafruit_SPIDevice.h控制
5 测试说明
在applications/arduino_pinout/examples/arduino_examples.cpp文件中,已经根据功能预设了一系列函数用于测试arduino各个功能,可根据测试需要,取消注释对应的宏定义即可启用对应的测试。如果需要测试,请将arduino_examples.cpp文件的内容覆盖到applications/arduino_main.cpp文件中
- RTduino各功能测试
目前支持的测试如下:
| 宏定义 | 名称 | 描述 |
|---|---|---|
| ARDU_TEST_GPIO | 数字GPIO测试 | 测试数字管脚的输出功能,包括两个管脚输出高/低电平,一个管脚输出一个0.5s周期的方波 |
| ARDU_TEST_PWM | 模拟PWM输出测试 | PWM功能输出测试,分别在三个PWM管脚输出不同的三种占空比的方波 |
| ARDU_TEST_ADAFRUIT_I2C | AdafruitI2C测试 | 使用AdafruitI2C库发送数据,测试正常可以收到不断发送的"ABtestabtest" |
| ARDU_TEST_ADAFRUIT_SPI | AdafruitSPI测试 | 使用AdafruitSPI库发送数据,测试正常可收到不断的"test" |
| ARDU_TEST_I2C | I2C测试 | 通过I2C接口发送数据,测试正常可收到不断的"test" |
| ARDU_TEST_SPI | SPI测试 | 通过SPI接口发送和接收数据,测试正常可收到不断的"test" |
| ARDU_TEST_INT | 中断测试 | 测试外部中断,按下方向键的中键会打印相关信息 |
| ARDU_TEST_DIGITAL_READ | 数字读测试 | 不断读取各个方向键的状态,并在按下时输出信息 |
| ARDU_TEST_ADC_READ | ADC测试 | 循环读取各个ADC的数据,并通过串口打印 |
| ARDU_TEST_BMI160_PKG | 第三方BMI160包测试 | 测试导入的BMI160库是否正常,程序会不断读取传感器数据并通过串口打印 |
-
第三方arduino库导入测试
用法:下载完毕后解压放到 packages\RTduino-latest\libraries\user目录下即可
需要修改一处:这个库有一处函数重载歧义,856行需改为Wire.requestFrom(dev->id,(uint8_t)len);
选择BMI160的库DFRobot_BMI160用于测试,用keil编译时存在以下问题:
-
缺少INT8_C和UINT8_C宏定义,手动在pins_arduino.h或其他Arduino头文件中添加
#ifndef INT8_C #define INT8_C(x) ((int8_t)x) #endif #ifndef UINT8_C #define UINT8_C(x) ((uint8_t)x) #endif -
编译报错:Data initializer is not allowed
如果使用AC5编译器,给arduino_main.cpp和DFRobot_BMI160.cpp添加 --cpp11 --gnu
如果使用AC6编译器,修改工程文件,删掉所有的 --cpp11 --c11 --gnu
如果用RT-Thread Studio编译,则不存在这些问题,只需修改存在歧义的问题即可直接使用
-
6 其他说明
1.ADC
目前ES32的ADC返回的是原始值,需要计算转换为实际的电压值,暂时不支持分辨率调节,会出现警告信息,无视即可。
2.对非数字IO的管脚不要调用pinMode
非数字IO的管脚在其他地方已经初始化了,再次调用pinMode会使他变为普通管脚且无法再重新初始化为非数字IO的功能。即对于任意管脚可以调用pinMode使它变为数字IO管脚,但这一过程不可逆,原有的预设功能将会失效
3.SPI/I2C/UART使用
默认只开启了spi0、i2c0及uart2(默认控制台串口),如果需要使用其他的spi/i2c/uart可以在配置中启用,并在初始化时指定名称即可。如果想要调整管脚信息,可以使用ESCodeMaker辅助,但要注意打开对应的外设。
SPI必须先调用begin才能使用其他函数
4.RTduino编译报错 "posix/xxx.h cannot find"
如果编译报错为 "posix/xxx.h cannot find",请更新rt-thread到最新版本(从github仓库拉取最新的源码)