4.9 KiB
Kendryte K210板级支持包说明
1. 简介
Kendryte K210 是集成机器视觉与机器听觉能力的系统级芯片(SoC)。使用台积电 (TSMC) 超低功耗的 28 纳米先进制程,具有双核64位处理器,拥有较好的功耗性能,稳定性与可靠性。该方案力求零门槛开发,可在最短时效部署于用户的产品中,赋予产品人工智能。
Kendryte K210 定位于AI与IoT市场的SoC,同时是使用非常方便的MCU。
Kendryte中文含义为勘智,而勘智取自勘物探智。这颗芯片主要应用领域为物联网领域,在物联网领域进行开发,因此为勘物;这颗芯片主要提供的是人工智能解决方案,在人工智能领域探索,因此为探智。
- 具备机器视觉能力
- 具备机器听觉能力
- 更好的低功耗视觉处理速度与准确率
- 具备卷积人工神经网络硬件加速器KPU,可高性能进行卷积人工神经网络运算
- TSMC 28nm先进制程,温度范围-40°C到125°C,稳定可靠
- 支持固件加密,难以使用普通方法破解
- 独特的可编程IO阵列,使产品设计更加灵活
- 低电压,与相同处理能力的系统相比具有更低功耗
- 3.3V/1.8V双电压支持,无需电平转换,节约成本
芯片规格包括如下:
| 硬件 | 描述 |
|---|---|
| 芯片型号 | K210 |
| CPU | 双核RV64GC |
| 主频 | 400MHz |
| 片内SRAM | 8MB |
| 外设 | 内嵌AES与SHA256算法加速器 |
| DVP、JTAG、OTP、FPIOA、GPIO、UART、SPI、RTC、I²S、I²C、WDT、Timer与PWM |
2. 编译说明
编译 K210,需要有 RT-Thread 的代码,因为 K210 的 sdk 是以软件包方式,所以需要在 bsp/k210 下做软件包更新。注意,需要使用 latest 的 RT-Thread 源码和 Latest 的软件包,软件包在menuconfig中的配置路径如下:
RT-Thread online packages --->
peripheral libraries and drivers --->
Kendryte SDK --->
[*] kendryte K210 SDK
最新的 k210 SDK 使用了 C++17 编写了部分代码,因此需要打开 C++ 组件,C++组件在menuconfig中的配置路径如下:
RT-Thread Components ---> C++ features
Windows下推荐使用env工具,然后在console下进入bsp/k210目录中,运行:
cd bsp/k210
menuconfig # 在软件包中选择最新的 k210 SDK
pkgs --update
如果在Linux平台下,可以先执行
scons --menuconfig
它会自动下载env相关脚本到~/.env目录,然后执行
source ~/.env/env.sh
cd bsp/k210
pkgs --update
下载risc-v的工具链,下载地址
更新完软件包后,在rtconfig.py中将risc-v工具链的本地路径加入文档。
注:
- 工具链建议使用上方提供的,
kendryte的官方工具链会报浮点类型不兼容的错误,risc-v工具链8.2.0之前的版本会出现头文件不兼容的问题。 - 网上传需要开启C++ 17,认为k210的神经网络编译器nncase多数语法由C++ 17,故需要开启C++ 17。个人认为没有必要,nncase是在PC端独立使用的, 作用是将神经网络模型转为kmodel格式,此格式文件为已经编译的二进制文件。(shentalon注)
然后执行scons编译:
set RTT_EXEC_PATH=C:\Users\xxxx\Downloads\xpack-riscv-none-embed-gcc-10.2.0-1.2\bin
scons
来编译这个板级支持包。如果编译正确无误,会产生rtthread.elf、rtthread.bin文件。其中rtthread.bin需要烧写到设备中进行运行。
注:如果初次使用编译报错,可能是使用的SDK过老,使用menuconfig命令,在→ RT-Thread online packages → peripheral libraries
and drivers → the kendryte-sdk package for rt-thread中将SDK改为latest版本即可。
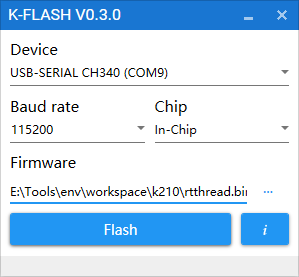
3. 烧写及执行
连接好串口,然后使用K-Flash工具进行烧写bin文件。
3.1 运行结果
如果编译 & 烧写无误,当复位设备后,会在串口上看到RT-Thread的启动logo信息:
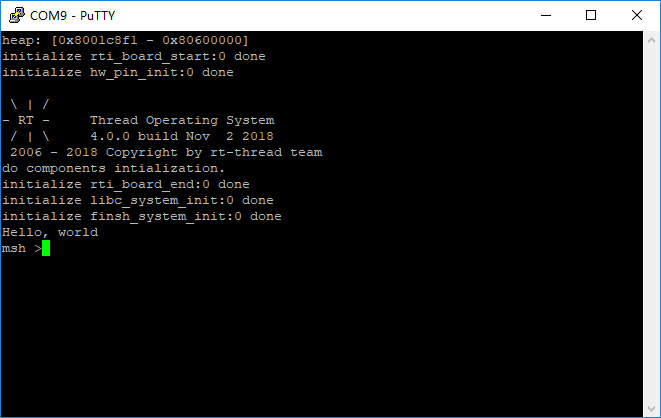
如果是K210-test_v0.2开发板,可以用如下命令来打开串口:
python -m serial.tools.miniterm --rts 0 --dtr 0 COM9 115200
4. 驱动支持情况及计划
| 驱动 | 支持情况 | 备注 |
|---|---|---|
| UART | 支持 | 高速UART,用于shell |
5. 联系人信息
维护人:bernard
6. 注意事项
在进行系统menuconfig配置时,以下项是必选的
| 配置项 | 强制配置值 |
|---|---|
| Alignment size for CPU architecture data access | 8 |
| The stack size of idle thread | > 1024 |
| the device name for console | "uarths" |
| Set main thread stack size | 4096 |