19 KiB
GD32 RISC-V系列 BSP 制作教程
1. BSP 框架介绍
BSP 框架结构如下图所示:
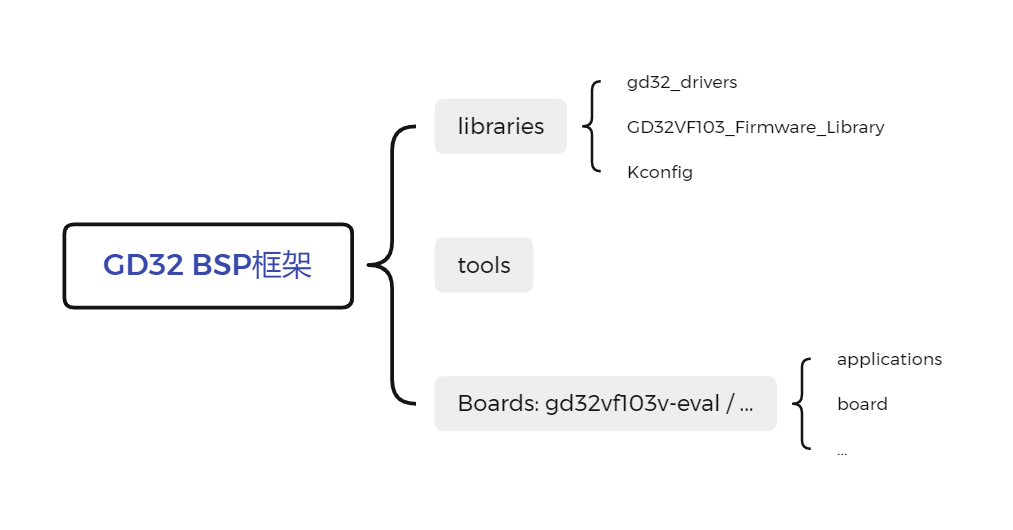
GD32的BSP架构主要分为三个部分:libraries、tools和具体的Boards,其中libraries包含了GD32的通用库,包括每个系列的Firmware Library以及适配RT-Thread的drivers;tools是生成工程的Python脚本工具;另外就是Boards文件,当然这里的Boards有很多,我这里值列举了GD32VF103V_EVAL。
2. 知识准备
制作一个 BSP 的过程就是构建一个新系统的过程,因此想要制作出好用的 BSP,要对 RT-Thread 系统的构建过程有一定了解,需要的知识准备如下所示:
-
掌握 GD32 RISC-V系列 BSP 的使用方法
了解 BSP 的使用方法,可以阅读 BSP 说明文档 中使用教程表格内的文档。
-
了解 RISC-V系列MCU的基本架构与特征
-
了解 Scons 工程构建方法
RT-Thread 使用 Scons 作为系统的构建工具,因此了解 Scons 的常用命令对制作新 BSP 是基本要求。
-
了解设备驱动框架
在 RT-Thread 系统中,应用程序通过设备驱动框架来操作硬件,因此了解设备驱动框架,对添加 BSP 驱动是很重要的。
-
了解 Kconfig 语法
RT-Thread 系统通过 menuconfig 的方式进行配置,而 menuconfig 中的选项是由 Kconfig 文件决定的,因此想要对 RT-Thread 系统进行配置,需要对 kconfig 语法有一定了解。
3. BSP移植
3.1 GCC环境准备
RISC-V系列MCU使用的工具链是xPack GNU RISC-V Embedded GCC。
在配置交叉编译工具链之前,需要下载得到GCC工具链的安装包,然后解压即可,也可配置环境变量。

根据自己的主机选择相应的版本,下载完成解压即可。
3.2 BSP工程制作
1.构建基础工程 首先看看RT-Thread代码仓库中已有很多BSP,而我要移植的是RISC-V内核。这里参考GD32 ARM工程。最终目录如下:
risc-v
docs # 说明文档
gd32vf103v-eval # 具体BSP
libraries # 库文件
gd32_drivers
GD32VF103_Firmware_Library # GD官方固件库
tools
OpenOCD # OpenOCD 下载调试工具
README.md
2.修改BSP构建脚本 bsp/gd32/risc-v/gd32vf103v-eval/SConstruct修改后的内容如下:
import os
import sys
import rtconfig
if os.getenv('RTT_ROOT'):
RTT_ROOT = os.getenv('RTT_ROOT')
else:
RTT_ROOT = os.path.normpath(os.getcwd() + '/../../../..')
sys.path = sys.path + [os.path.join(RTT_ROOT, 'tools')]
try:
from building import *
except:
print('Cannot found RT-Thread root directory, please check RTT_ROOT')
print(RTT_ROOT)
exit(-1)
TARGET = 'rtthread.' + rtconfig.TARGET_EXT
DefaultEnvironment(tools=[])
env = Environment(tools = ['mingw'],
AS = rtconfig.AS, ASFLAGS = rtconfig.AFLAGS,
CC = rtconfig.CC, CCFLAGS = rtconfig.CFLAGS,
AR = rtconfig.AR, ARFLAGS = '-rc',
CXX = rtconfig.CXX, CXXFLAGS = rtconfig.CXXFLAGS,
LINK = rtconfig.LINK, LINKFLAGS = rtconfig.LFLAGS)
env.PrependENVPath('PATH', rtconfig.EXEC_PATH)
env['ASCOM'] = env['ASPPCOM']
Export('RTT_ROOT')
Export('rtconfig')
SDK_ROOT = os.path.abspath('./')
if os.path.exists(SDK_ROOT + '/libraries'):
libraries_path_prefix = SDK_ROOT + '/libraries'
else:
libraries_path_prefix = os.path.dirname(SDK_ROOT) + '/libraries'
SDK_LIB = libraries_path_prefix
Export('SDK_LIB')
# prepare building environment
# objs = PrepareBuilding(env, RTT_ROOT, has_libcpu=False)
objs = PrepareBuilding(env, RTT_ROOT)
gd32_library = 'GD32VF103_Firmware_Library'
rtconfig.BSP_LIBRARY_TYPE = gd32_library
# include libraries
objs.extend(SConscript(os.path.join(libraries_path_prefix, gd32_library, 'SConscript')))
# include drivers
objs.extend(SConscript(os.path.join(libraries_path_prefix, 'gd32_drivers', 'SConscript')))
# make a building
DoBuilding(TARGET, objs)
该文件用于链接所有的依赖文件,并调用make进行编译。该文件主要修改固件库的路径。
bsp/gd32/risc-v/gd32vf103v-eval/rtconfig.py修改后的内容如下:
import os
# toolchains options
ARCH='risc-v'
CPU='bumblebee'
CROSS_TOOL='gcc'
# bsp lib config
BSP_LIBRARY_TYPE = None
if os.getenv('RTT_CC'):
CROSS_TOOL = os.getenv('RTT_CC')
if os.getenv('RTT_ROOT'):
RTT_ROOT = os.getenv('RTT_ROOT')
# cross_tool provides the cross compiler
# EXEC_PATH is the compiler execute path, for example, CodeSourcery, Keil MDK, IAR
if CROSS_TOOL == 'gcc':
PLATFORM = 'gcc'
EXEC_PATH = EXEC_PATH = r'D:/gcc/xpack-riscv-none-embed-gcc-10.2.0-1.2/bin'
else:
print('Please make sure your toolchains is GNU GCC!')
exit(0)
if os.getenv('RTT_EXEC_PATH'):
EXEC_PATH = os.getenv('RTT_EXEC_PATH')
CORE = 'risc-v'
BUILD = 'debug'
MAP_FILE = 'rtthread.map'
LINK_FILE = '../libraries/GD32VF103_Firmware_Library/RISCV/env_Eclipse/GD32VF103xB.lds'
if PLATFORM == 'gcc':
# toolchains
PREFIX = 'riscv-none-embed-'
CC = PREFIX + 'gcc'
AS = PREFIX + 'gcc'
AR = PREFIX + 'ar'
CXX = PREFIX + 'g++'
LINK = PREFIX + 'gcc'
TARGET_EXT = 'elf'
SIZE = PREFIX + 'size'
OBJDUMP = PREFIX + 'objdump'
OBJCPY = PREFIX + 'objcopy'
DEVICE = ' -march=rv32imac -mabi=ilp32 -DUSE_PLIC -DUSE_M_TIME -DNO_INIT -mcmodel=medany -msmall-data-limit=8 -L. -nostartfiles -lc '
CFLAGS = DEVICE
CFLAGS += ' -save-temps=obj'
AFLAGS = '-c'+ DEVICE + ' -x assembler-with-cpp'
AFLAGS += ' -Iplatform -Ilibraries/RISCV/include -Ilibraries/RISCV/env_Eclipse'
LFLAGS = DEVICE
LFLAGS += ' -Wl,--gc-sections,-cref,-Map=' + MAP_FILE
LFLAGS += ' -T ' + LINK_FILE
LFLAGS += ' -Wl,-wrap=memset'
CPATH = ''
LPATH = ''
if BUILD == 'debug':
CFLAGS += ' -O0 -g3'
AFLAGS += ' -g3'
else:
CFLAGS += ' -O2'
CXXFLAGS = CFLAGS
POST_ACTION = OBJCPY + ' -O binary $TARGET rtthread.bin\n' + SIZE + ' $TARGET \n'
def dist_handle(BSP_ROOT, dist_dir):
import sys
cwd_path = os.getcwd()
sys.path.append(os.path.join(os.path.dirname(BSP_ROOT), 'tools'))
from sdk_dist import dist_do_building
dist_do_building(BSP_ROOT, dist_dir)
该文件编译参数,主要关注链接脚本和交叉编译工具链,工具链的地址需要根据实际的地址修改,gd32vf103v-eval开发板使用的芯片是GD32VF103VB,因此其链接脚本是GD32VF103xB.lds。
3.修改board文件夹 (1) 修改bsp/gd32/risc-v/gd32vf103v-eval/board/Kconfig文件
修改后内容如下:
menu "Hardware Drivers Config"
config SOC_SERIES_GD32VF103V
bool
default y
config SOC_GD32VF103V
bool
select SOC_SERIES_GD32VF103V
select RT_USING_COMPONENTS_INIT
select RT_USING_USER_MAIN
default y
menu "Onboard Peripheral Drivers"
endmenu
menu "On-chip Peripheral Drivers"
config BSP_USING_GPIO
bool "Enable GPIO"
select RT_USING_PIN
default y
menuconfig BSP_USING_UART
bool "Enable UART"
default y
select RT_USING_SERIAL
if BSP_USING_UART
config BSP_USING_UART0
bool "Enable UART0"
default y
config BSP_UART0_RX_USING_DMA
bool "Enable UART0 RX DMA"
depends on BSP_USING_UART0
select RT_SERIAL_USING_DMA
default n
config BSP_USING_UART1
bool "Enable UART1"
default n
config BSP_UART1_RX_USING_DMA
bool "Enable UART1 RX DMA"
depends on BSP_USING_UART1
select RT_SERIAL_USING_DMA
default n
config BSP_USING_UART2
bool "Enable UART2"
default n
config BSP_UART2_RX_USING_DMA
bool "Enable UART2 RX DMA"
depends on BSP_USING_UART2
select RT_SERIAL_USING_DMA
default n
config BSP_USING_UART3
bool "Enable UART3"
default n
config BSP_UART3_RX_USING_DMA
bool "Enable UART3 RX DMA"
depends on BSP_USING_UART3
select RT_SERIAL_USING_DMA
default n
config BSP_USING_UART4
bool "Enable UART4"
default n
config BSP_UART4_RX_USING_DMA
bool "Enable UART4 RX DMA"
depends on BSP_USING_UART4
select RT_SERIAL_USING_DMA
default n
endif
menuconfig BSP_USING_SPI
bool "Enable SPI BUS"
default n
select RT_USING_SPI
if BSP_USING_SPI
config BSP_USING_SPI1
bool "Enable SPI1 BUS"
default n
config BSP_SPI1_TX_USING_DMA
bool "Enable SPI1 TX DMA"
depends on BSP_USING_SPI1
default n
config BSP_SPI1_RX_USING_DMA
bool "Enable SPI1 RX DMA"
depends on BSP_USING_SPI1
select BSP_SPI1_TX_USING_DMA
default n
endif
menuconfig BSP_USING_I2C1
bool "Enable I2C1 BUS (software simulation)"
default n
select RT_USING_I2C
select RT_USING_I2C_BITOPS
select RT_USING_PIN
if BSP_USING_I2C1
config BSP_I2C1_SCL_PIN
int "i2c1 scl pin number"
range 1 216
default 24
config BSP_I2C1_SDA_PIN
int "I2C1 sda pin number"
range 1 216
default 25
endif
menuconfig BSP_USING_ADC
bool "Enable ADC"
default n
select RT_USING_ADC
if BSP_USING_ADC
config BSP_USING_ADC0
bool "Enable ADC0"
default n
config BSP_USING_ADC1
bool "Enable ADC1"
default n
config BSP_USING_ADC2
bool "Enable ADC2"
default n
endif
menuconfig BSP_USING_TIM
bool "Enable timer"
default n
select RT_USING_HWTIMER
if BSP_USING_TIM
config BSP_USING_TIM10
bool "Enable TIM10"
default n
config BSP_USING_TIM11
bool "Enable TIM11"
default n
config BSP_USING_TIM12
bool "Enable TIM13"
default n
endif
menuconfig BSP_USING_ONCHIP_RTC
bool "Enable RTC"
select RT_USING_RTC
default n
if BSP_USING_ONCHIP_RTC
choice
prompt "Select clock source"
default BSP_RTC_USING_LSE
config BSP_RTC_USING_LSE
bool "RTC USING LSE"
config BSP_RTC_USING_LSI
bool "RTC USING LSI"
endchoice
endif
config BSP_USING_WDT
bool "Enable Watchdog Timer"
select RT_USING_WDT
default n
source "../libraries/gd32_drivers/Kconfig"
endmenu
menu "Board extended module Drivers"
endmenu
endmenu
这个文件就是配置板子驱动的,这里可根据实际需求添加。
(2) 修改bsp/gd32/risc-v/gd32vf103v-eval/board/SConscript文件 修改后内容如下:
import os
import rtconfig
from building import *
Import('SDK_LIB')
cwd = GetCurrentDir()
# add general drivers
src = Split('''
board.c
''')
path = [cwd]
startup_path_prefix = SDK_LIB
if rtconfig.PLATFORM in ['gcc']:
src += [startup_path_prefix + '/GD32VF103_Firmware_Library/RISCV/env_Eclipse/start.S']
src += [startup_path_prefix + '/GD32VF103_Firmware_Library/RISCV/env_Eclipse/entry.S']
CPPDEFINES = ['GD32VF103V_EVAL']
group = DefineGroup('Drivers', src, depend = [''], CPPPATH = path, CPPDEFINES = CPPDEFINES)
Return('group')
该文件主要添加board文件夹的.c文件和头文件路径。另外根据开发环境选择相应的汇编文件,和前面的libraries的SConscript语法是一样,文件的结构都是类似的,这里就没有注释了。
到这里,基本所有的依赖脚本都配置完成了。
4.固件库修改 (1) 修改bsp/gd32/risc-v/libraries/GD32VF103_Firmware_Library/RISCV/env_Eclipse/start.S GCC 环境下的启动是由 entry() 函数调用的启动函数 rt_thread_startup(),所以需要修改启动文的C语言入口。

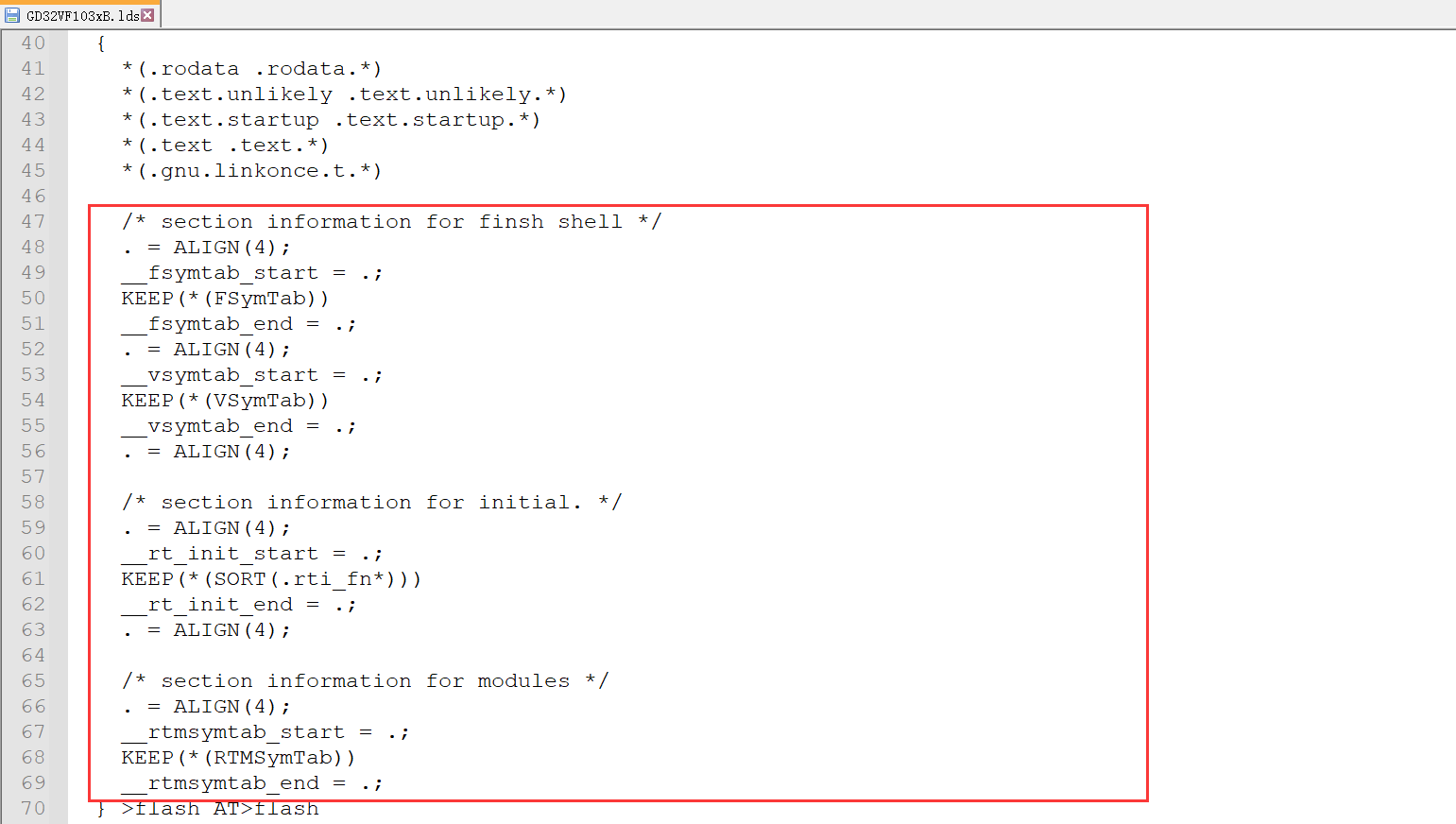
(2) 修改bsp/gd32/risc-v/libraries/GD32VF103_Firmware_Library/RISCV/env_Eclipse/GD32VF103xB.lds GD32VF103xB.lds文件需要新增RT-Thread堆栈的位置,否则无法正常运转,新增代码如下:
/* section information for finsh shell */
. = ALIGN(4);
__fsymtab_start = .;
KEEP(*(FSymTab))
__fsymtab_end = .;
. = ALIGN(4);
__vsymtab_start = .;
KEEP(*(VSymTab))
__vsymtab_end = .;
. = ALIGN(4);
/* section information for initial. */
. = ALIGN(4);
__rt_init_start = .;
KEEP(*(SORT(.rti_fn*)))
__rt_init_end = .;
. = ALIGN(4);
/* section information for modules */
. = ALIGN(4);
__rtmsymtab_start = .;
KEEP(*(RTMSymTab))
__rtmsymtab_end = .;
5.驱动修改 一个基本的BSP中,串口是必不可少的,所以还需要编写串口驱动,这里使用的串口0作为调试串口。
板子上还有LED灯,主要编写GPIO驱动即可。
关于串口和LED的驱动可以查看源码,这里就不贴出来了。
6.应用开发 笔者在applications的main.c中添加LED的应用代码,
#include <stdio.h>
#include <rtthread.h>
#include <rtdevice.h>
#include <board.h>
/* defined the LED1 pin: PC0 */
#define LED1_PIN GET_PIN(C, 0)
int main(void)
{
int count = 1;
/* set LED1 pin mode to output */
rt_pin_mode(LED1_PIN, PIN_MODE_OUTPUT);
while (count++)
{
rt_pin_write(LED1_PIN, PIN_HIGH);
rt_thread_mdelay(500);
rt_pin_write(LED1_PIN, PIN_LOW);
rt_thread_mdelay(500);
}
return RT_EOK;
}
当然,这需要GPIO驱动的支持。
7.使用ENV编译工程 在env中执行:scons
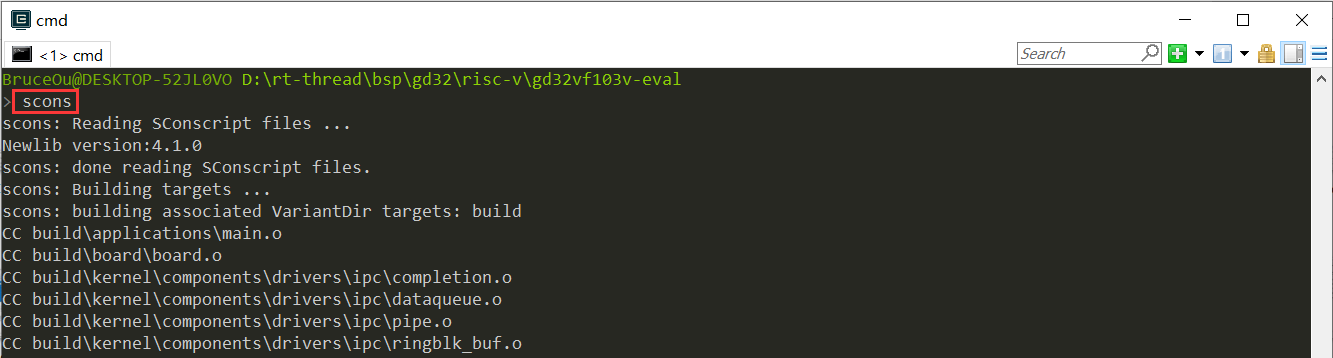
编译成功打印信息如下:

8.使用VS Code开发GD32 在env中执行:scons --target=vsc

这样就可方便使用VSCode开发GD32了,当然,这里只是生成了c_cpp_properties.json,要想使用VS Code下载代码还需要更多的配置,下一节讲解。
3.3固件下载
前面使用ENV成功编译GD32VF103V-SEVAL的固件,那么接下来就是下载环节,下载方式很多,笔者这里讲解使用OpenOCD工具下载。
OpenOCD是用于对RISC-V进行下载仿真的软件工具,是一个开源软件包。当然啦,要想使用OpenOCD下载固件,需要GD-Link或者J-Link的支持。OpenOCD软件包已经放在bsp/gd32/risc-v/tools,只需要简单配置就可以,笔者这里使用VS Code开发。
1.新建bsp/gd32/risc-v/gd32vf103v-eval/.vscode/tasks.json
tasks.json的作用就是配置工程的编译、下载等工作。如果没有则需要创建tasks.json文件,内容如下:
{
"version": "2.0.0",
"tasks": [
{
"label": "download",
"type": "shell",
"command": "../tools/OpenOCD/bin/openocd.exe",
"args": [
"-f",
"../tools/interface/openocd_gdlink_riscv.cfg",
"-c",
"program rtthread.elf exit"
]
}
]
}
这个文件创建了一个任务,任务名为download,用于在线下载固件。 选择“终端->运行任务…”

选择task中配置的命令download。

稍等片刻,即可下载成功。
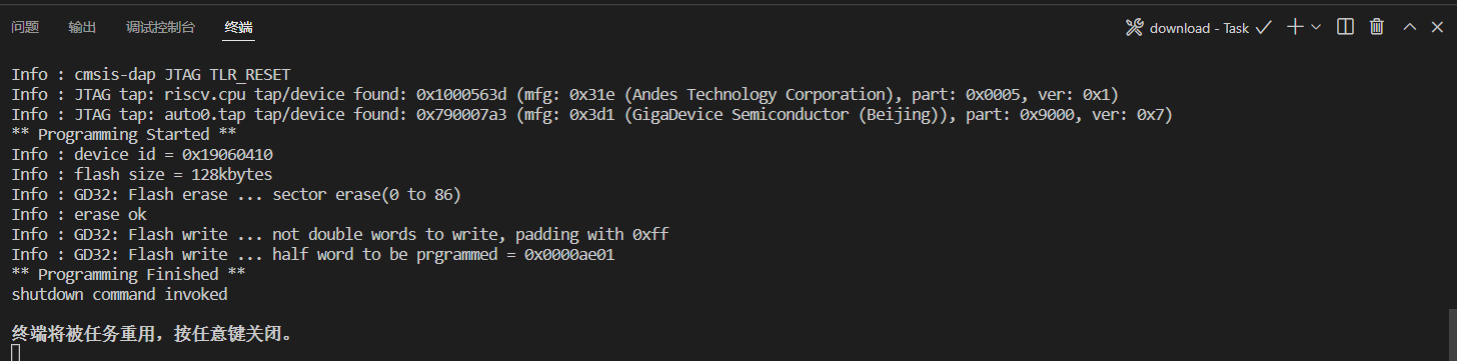
固件下载成后,接上串口0,打印信息如下:

同时LED会不断闪烁。
4. 规范
本章节介绍 RT-Thread GD32 系列 BSP 制作与提交时应当遵守的规范 。开发人员在 BSP 制作完成后,可以根据本规范提出的检查点对制作的 BSP 进行检查,确保 BSP 在提交前有较高的质量 。
4.1 BSP 制作规范
GD32 BSP 的制作规范主要分为 3 个方面:工程配置,ENV 配置和 IDE 配置。在已有的 GD32 系列 BSP 的模板中,已经根据下列规范对模板进行配置。在制作新 BSP 的过程中,拷贝模板进行修改时,需要注意的是不要修改这些默认的配置。BSP 制作完成后,需要对新制作的 BSP 进行功能测试,功能正常后再进行代码提交。
下面将详细介绍 BSP 的制作规范。
4.1.1 工程配置
- 遵从RT-Thread 编码规范,代码注释风格统一
- main 函数功能保持一致
- 如果有 LED 的话,main 函数里只放一个 LED 1HZ 闪烁的程序
- 在
rt_hw_board_init中需要完成堆的初始化:调用rt_system_heap_init - 默认只初始化 GPIO 驱动和 FinSH 对应的串口驱动,不使用 DMA
- 当使能板载外设驱动时,应做到不需要修改代码就能编译下载使用
- 提交前应检查 GCC/IAR 编译器直接编译或者重新生成后编译是否成功
- 使用
dist命令对 BSP 进行发布,检查使用dist命令生成的工程是否可以正常使用
4.1.2 ENV 配置
- 系统心跳统一设置为 1000(宏:RT_TICK_PER_SECOND)
- BSP 中需要打开调试选项中的断言(宏:RT_USING_DEBUG)
- 系统空闲线程栈大小统一设置为 256(宏:IDLE_THREAD_STACK_SIZE)
- 开启组件自动初始化(宏:RT_USING_COMPONENTS_INIT)
- 需要开启 user main 选项(宏:RT_USING_USER_MAIN)
- 默认关闭 libc(宏:RT_USING_LIBC)
- FinSH 默认只使用 MSH 模式(宏:FINSH_USING_MSH_ONLY)
4.2 BSP 提交规范
- 提交前请认真修改 BSP 的 README.md 文件,README.md 文件的外设支持表单只填写 BSP 支持的外设,可参考其他 BSP 填写。查看文档[《GD32系列驱动介绍》](./GD32 RISC-V系列驱动介绍.md)了解驱动分类。
- 提交 BSP 分为 2 个阶段提交:
- 第一阶段:基础 BSP 包括串口驱动和 GPIO 驱动,能运行 FinSH 控制台。完成IAR 和 GCC 编译器支持。 BSP 的 README.md 文件需要填写第二阶段要完成的驱动。
- 第二阶段:完成板载外设驱动支持,所有板载外设使用 menuconfig 配置后就能直接使用。若开发板没有板载外设,则此阶段可以不用完成。不同的驱动要分开提交,方便 review 和合并。
- 只提交 BSP 必要的文件,删除无关的中间文件,能够提交的文件请对照其他 BSP。
- 提交前要对 BSP 进行编译测试,确保在不同编译器下编译正常
- 提交前要对 BSP 进行功能测试,确保 BSP 的在提交前符合工程配置章节中的要求