|
|
||
|---|---|---|
| .. | ||
| README.md | ||
| README_zh.md | ||
| SConscript | ||
| nucleo-f411-pinout.png | ||
| pins_arduino.c | ||
| pins_arduino.h | ||
{kind=link}
README.md
The Arduino Compatible for STM32F411 Nucleo Board
English | 中文
1 RTduino - Arduino Ecosystem Compatibility Layer for RT-Thread
STM32F411 Nucleo board has support RTduino. Users can use Arduino APIs, third party libraries and programming method to program on the board.
1.1 How to Enable RTduino
Please go to the RTduino repository to see the details.
Hardware Drivers Config --->
Onboard Peripheral Drivers --->
[*] Compatible with Arduino Ecosystem (RTduino)
2 Arduino Pinout
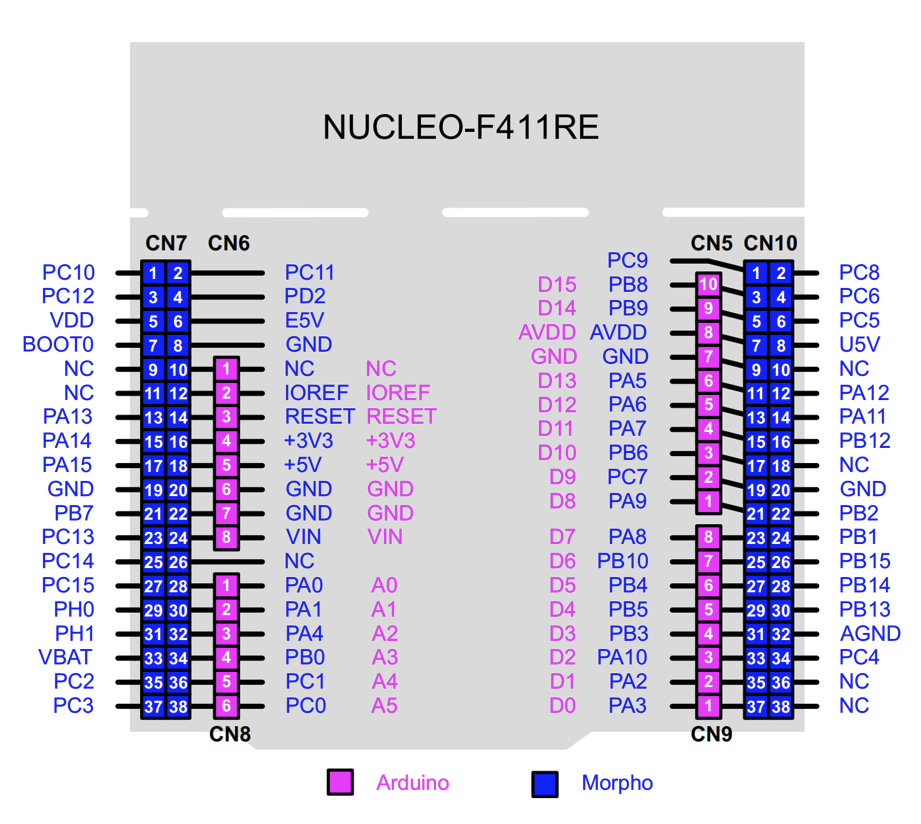
This board complies with Arduino UNO pins layout. For more details, please take a look at: pins_arduino.c and pins_arduino.h.
| Arduino Pin | STM32 Pin | 5V Tolerate | Note |
|---|---|---|---|
| 0 (D0) | PA3 | Yes | Serial-Rx. Token over by RT-Thread UART device by default |
| 1 (D1) | PA2 | Yes | Serial-Tx. Token over by RT-Thread UART device by default |
| 2 (D2) | PA10 | Yes | |
| 3 (D3) | PB3 | Yes | PWM2-CH2. Token over by RT-Thread PWM device by default |
| 4 (D4) | PB5 | Yes | |
| 5 (D5) | PB4 | Yes | PWM3-CH1. Token over by RT-Thread PWM device by default |
| 6 (D6) | PB10 | Yes | PWM2-CH3. Token over by RT-Thread PWM device by default |
| 7 (D7) | PA8 | Yes | |
| 8 (D8) | PA9 | Yes | |
| 9 (D9) | PC7 | Yes | PWM3-CH2. Token over by RT-Thread PWM device by default |
| 10 (D10) | PB6 | Yes | PWM4-CH1. Token over by RT-Thread PWM device by default |
| 11 (D11) | PA7 | Yes | PWM1-CH1N. Token over by RT-Thread PWM device by default |
| 12 (D12) | PA6 | Yes | |
| 13 (D13, LED_BUILTIN) | PA5 | Yes | USER LED |
| 14 (D14) | PB9 | Yes | I2C-SDA. Token over by RT-Thread I2C device by default |
| 15 (D15) | PB8 | Yes | I2C-SCL. Token over by RT-Thread I2C device by default |
| 16 (D16) | PC13 | Yes | USER Button |
| A0 | PA0 | Yes | ADC1-CH0. Token over by RT-Thread ADC device by default |
| A1 | PA1 | Yes | ADC1-CH1. Token over by RT-Thread ADC device by default |
| A2 | PA4 | Yes | ADC1-CH4. Token over by RT-Thread ADC device by default |
| A3 | PB0 | Yes | ADC1-CH8. Token over by RT-Thread ADC device by default |
| A4 | PC1 | Yes | ADC1-CH11. Token over by RT-Thread ADC device by default |
| A5 | PC0 | Yes | ADC1-CH10. Token over by RT-Thread ADC device by default |
| A6 | -- | On-chip internal voltage sensor. ADC1-CH17. Token over by RT-Thread ADC device by default | |
| A7 | -- | On-chip internal temperature sensor. ADC1-CH16. Token over by RT-Thread ADC device by default |
Notice:
- Don't use a same hardware timer to drive PWM (analogRead) and servos at same time, because hardware timers can only generate a same frequency for 4 PWM channels. Otherwise, it could cause a failure when drive servos.
References
3 Communication
3.1 I2C Bus
I2C bus is SCL/D15 and SDA/D14 pins. Users can directly include the #include <Wire.h>, which is the Arduino official I2C header file, to use the I2C bus.
3.2 SPI Bus
This board doesn't support Arduino SPI header file and functions.
3.3 Serial
This board supports to use Serial. method to operate uart2 device. See example.