# BSP 外设驱动使用教程 ## 简介 本文档是为需要在 RT-Thread 操作系统上使用更多开发板资源的开发者准备的。通过使用 ENV 工具对 BSP 进行配置,可以开启更多板载资源,实现更多高级功能。 主要包括以下内容: 1. 如何使用开发板上更多的板载资源 2. 如何使用更多的片上资源 3. 如何添加更多片上资源选项 ## 前提要求 - 学会如何使用 ENV 工具,参考:[RT-Thread env 工具用户手册](https://www.rt-thread.org/document/site/#/development-tools/env/env) ## 如何使用更多的板载资源 开发板上一般有很多板载资源,如 Flash、SD卡、以太网等,但是 BSP 工程默认没有开启这些外设驱动。RT-Thread 提供了 ENV 工具来开启或关闭 BSP 的外设驱动。下面以在野火 imxrt1052 pro 开发板上开启 MPU6050 驱动为例,一步步的展示如何使用 ENV 工具对 BSP 进行配置。 ### 1)打开配置工具 在目录 `rt-thread\bsp\imxrt\imxrt1052-fire-pro` 下打开 menuconfig 配置界面。  打开的配置工具界面如下所示:  通过键盘上的上下键移动光标,选中 `Hardware Drivers Config`然后按回车键进入硬件驱动配置菜单。 ### 2)进入硬件驱动配置菜单 在硬件配置菜单里有三个选项,分别是 **板载外设配置菜单**、**片上外设配置菜单**和**扩展模块配置菜单**,按回车键进入板载外设配置菜单。  ### 3)在板载外设配置菜单里开启 MPU6050 选项  ### 4)保存退出 然后右移光标选中 Save 按回车键保存,然后按 Esc 键退出配置工具。  ### 5)更新软件包 输入命令 `pkgs --update` 使软件包配置生效。  ### 6)生成 MDK5 工程 输入命令 `scons --target=mdk5` 生成 MDK5 的工程。  ### 7)编译下载 打开生成的 MDK5 工程文件,编译并下载。 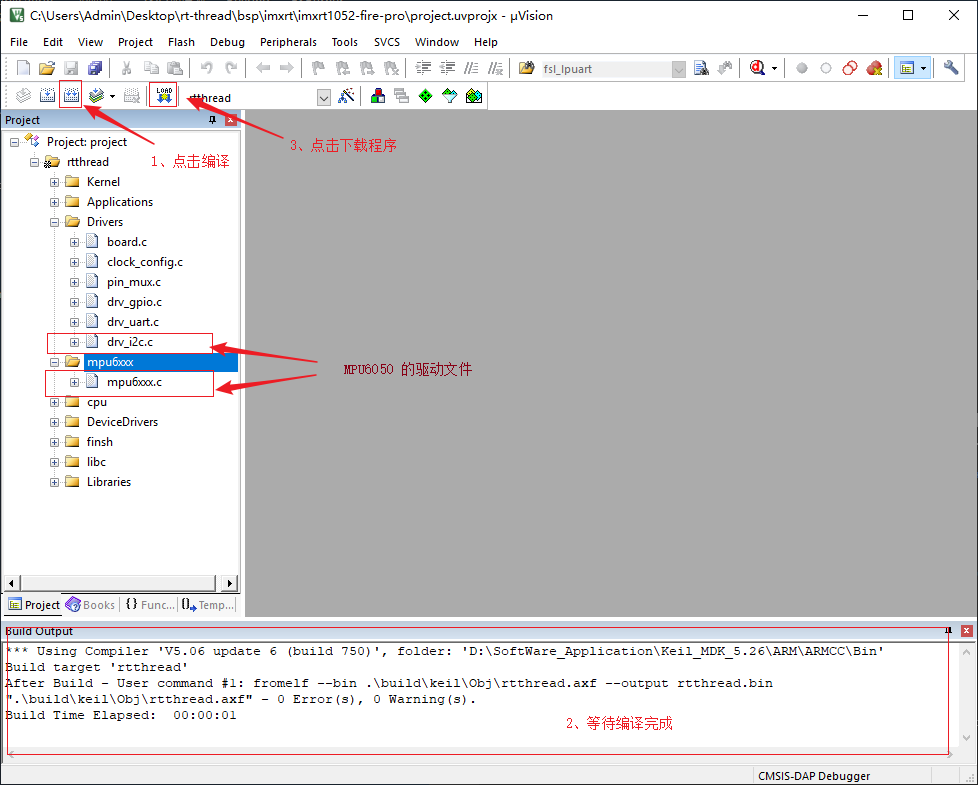 ### 8)查看运行结果 程序运行后,输入命令 `list_device` 可以看到名为 I2C 的块设备,MPU6050 通信选择的是 I2C 通信,此时 `MPU6050` 已经可以使用了。  ## 如何使用更多的片上资源 如果想要使用除了当前支持的片上资源(GPIO 和 UART1),又不想开启板载资源的支持,可以通过直接配置 **片上外设配置菜单** 的方式,使用更多片上资源。 配置方法和上一章节介绍的 **如何使用更多的板载资源的配置方法** 一样,只是本次需要进入 `片上外设配置菜单`。  配置完成后重新生成工程,编译下载,在 FinSH 控制台输入 `list_device` 命令,可以看到 PWM 已经启用。  ## 总结 当开发者需要使用未开启的外设时,只要在 ENV 工具中使能相关的外设即可,重新生成的工程中就会添加对应的驱动文件。开发者就可以利用 RT-Thread 提供的驱动开快速开发应用了。