# MIMXRT1060-EVK
**中文** | [英文](README.md)
## 1 BSP简介
本文档为 MIMXRT1060-EVK 开发板的 BSP (板级支持包) 说明。
主要内容如下:
- 开发板资源介绍
- BSP 快速上手
- 进阶使用方法
通过阅读快速上手章节开发者可以快速地上手该 BSP,将 RT-Thread 运行在开发板上。在进阶使用指南章节,将会介绍更多高级功能,帮助开发者利用 RT-Thread 驱动更多板载资源。
### 1.2 开发板介绍
开发板外观如下图所示:

该开发板常用 **板载资源** 如下:
- MCU:MIMXRT1062DVL6A,主频 600MHz,4096KB FLASH ,1024KB RAM
- 外部 RAM:型号IS42S16160J-6BLI,32MB
- 外部 FLASH:型号S26KS512SDPBHI02,64MB
- 常用外设
- LED:1个,D18(绿色)
- 按键:1个
- 常用接口:USB 转串口、SD 卡接口、以太网接口、LCD 接口等
- 调试接口,标准 JTAG/SWD
开发板更多详细信息请参考【NXP】 [MIMXRT1060-EVK开发板介绍](https://www.nxp.com.cn/design/development-boards/i-mx-evaluation-and-development-boards/i-mx-rt1060-evaluation-kit:MIMXRT1060-EVK)。
### 1.3 外设支持
本 BSP 目前对外设的支持情况如下:
| **板载外设** | **支持情况** | **备注** |
| :----------------- | :----------: | :------------------------------------- |
| USB 转串口 | 支持 | |
| SPI Flash | 支持 | |
| 以太网 | 支持 | |
| **片上外设** | **支持情况** | **备注** |
| GPIO | 支持 | PA0, PA1... PK15 ---> PIN: 0, 1...176 |
| UART | 支持 | UART1 |
| SPI | 暂不支持 | 即将支持 |
| I2C | 暂不支持 | 即将支持 |
| SDIO | 暂不支持 | 即将支持 |
| RTC | 暂不支持 | 即将支持 |
| PWM | 暂不支持 | 即将支持 |
| USB Device | 暂不支持 | 即将支持 |
| USB Host | 暂不支持 | 即将支持 |
| IWG | 暂不支持 | 即将支持 |
| **扩展模块** | **支持情况** | **备注** |
| LVGL | 支持 | |
### 1.4 使用说明
使用说明分为如下两个章节:
- 快速上手
本章节是为刚接触 RT-Thread 的新手准备的使用说明,遵循简单的步骤即可将 RT-Thread 操作系统运行在该开发板上,看到实验效果 。
- 进阶使用
本章节是为需要在 RT-Thread 操作系统上使用更多开发板资源的开发者准备的。通过使用 ENV 工具对 BSP 进行配置,可以开启更多板载资源,实现更多高级功能。
### 1.6 快速上手
本 BSP 为开发者提供 MDK4、MDK5 和 IAR 工程,以及GCC 开发环境。下面以 MDK5 开发环境为例,介绍如何将系统运行起来。
### 1.7 硬件连接
使用数据线连接开发板到 PC,打开电源开关。
### 1.8 编译下载
双击 project.uvprojx 文件,打开 MDK5 工程,编译并下载程序到开发板。
> 工程默认配置使用 CMSIS-DAP 仿真器下载程序,在通过 USB 连接开发板的基础上,点击下载按钮即可下载程序到开发板
### 1.9 运行结果
下载程序成功之后,系统会自动运行,LED会以1Hz的频率闪烁。
连接开发板对应串口到 PC , 在终端工具里打开相应的串口(115200-8-1-N),复位设备后,可以看到 RT-Thread 的输出信息:
```bash
\ | /
- RT - Thread Operating System
/ | \ 4.1.0 build Mar 10 2022 18:07:41
2006 - 2022 Copyright by RT-Thread team
msh >
```
### 1.10 进阶使用
此 BSP 默认只开启了 GPIO 和 串口1 的功能,如果需使用 SD 卡、Flash 等更多高级功能,需要利用 ENV 工具对BSP 进行配置(暂时还不支持,等待第二阶段),步骤如下:
1. 在 bsp 下打开 env 工具。
2. 输入`menuconfig`命令配置工程,配置好之后保存退出。
3. 输入`pkgs --update`命令更新软件包。
4. 输入`scons --target=mdk/iar` 命令重新生成工程。
本章节更多详细的介绍请参考 [IMXRT 系列 BSP 外设驱动使用教程](../docs/IMXRT系列BSP外设驱动使用教程.md)。
## 2 MIMXRT1060-EVK上手指南
**中文** | [English](MIMXRT1060-EVK User Manual.md)
MIMXRT1060-EVK支持RT-Studio工程,本上手指南以RT-Studio环境的开发说明举例。
### 2.1 准备阶段
- 拉取rt-thread的github仓库到本地,[链接地址](https://github.com/RT-Thread/rt-thread)。
- 下载安装RT-Thread Studio,[链接地址](https://www.rt-thread.org/studio.html)。
- 准备RW007模块。
### 2.2 BSP上手阶段
#### 2.2.1 menuconfig配置工程
打开MIMXRT1060-EVK BSP所在目录,在ENV工具中使用menuconfig命令配置工程

#### 2.2.2 取消暂时不需要的配置,具体操作如下:
Onboard Peripherial Drivers选项设置:

On-chip Peripherial Drivers选项设置:

### 2.3 点击文件,选择导入选项。

### 2.4 选择导入RT-Thread Bsp 到工作空间中

### 2.5 按照示例填写工程信息

### 2.6 编译工程

工程编译通过,至此,准备阶段完成。
## 3 使用RT-Studio配置BSP驱动
RT-Thread每个BSP已经默认适配了若干片上外设驱动与板载外设驱动,使用RT-Studio将相应的开关直接打开并依据使用环境配置相应参数即可使用。由于各个管脚存在复用功能,所以并不是所有的片上外设驱动与板载外设驱动都可以同时使用,使用时需要结合原理图来合理开启相应的外设驱动。
RT-Thread有许多软件软件包,使用RT-Studio将相应软件包的开关打开便可将软件包添加至工程使用。

## 4 联网实操:使用RW007模块联网
RW007 是由上海睿赛德电子科技有限公司开发的高速 WiFi 模块,使用 SPI 与主机通信。[RW007使用指南链接](https://www.rt-thread.org/document/site/#/rt-thread-version/rt-thread-standard/application-note/packages/rw007_module_using/an0034-rw007-module-using)。
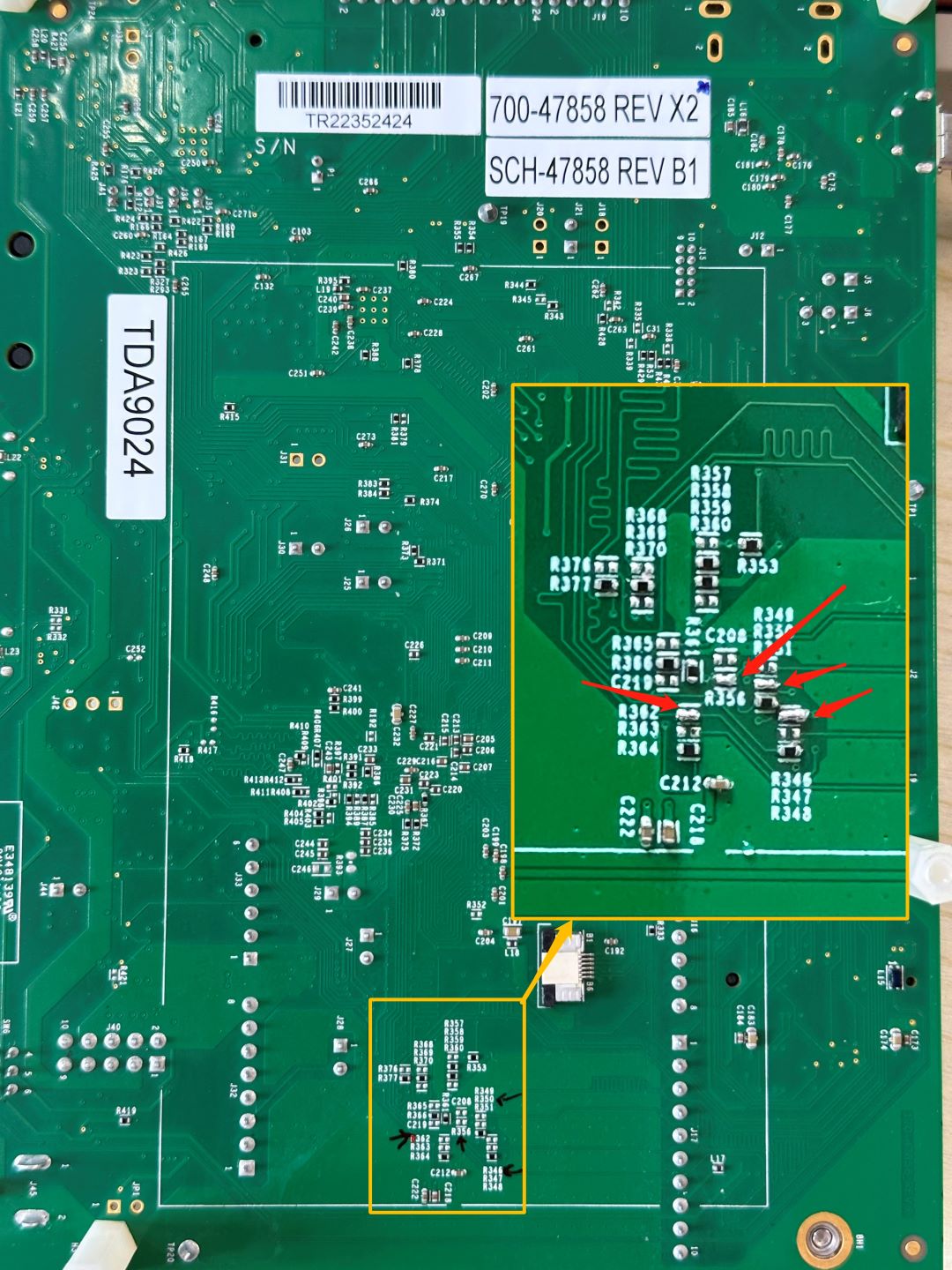
MIMXRT1060-EVK板载arduino接口提供的SPI接口与SD卡的SDIO接口使用的管脚存在重复的管脚,所以板载的SPI接口默认未连接,将下方**原理图中标记DNP的地方连接起来(使用SPI接口一定要做这一步!!!)**便可以使用板载arduino接口引出的SPI接口,此时板载的SD卡槽不可使用。

修改图示跳线:
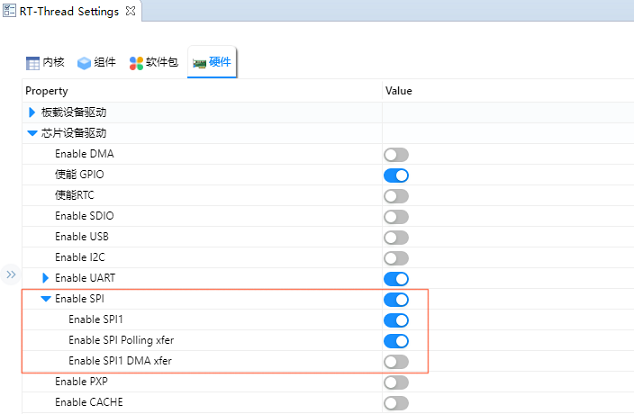
### 4.1 配置板载SPI外设
RW007可采用SPI接口通讯,MIMXRT1060-EVK支持SPI驱动,默认采用轮询的方式与RW007通讯(暂不支持中断与DMA模式与RW007通讯),使用RT-Studio配置SPI的具体配置如下:
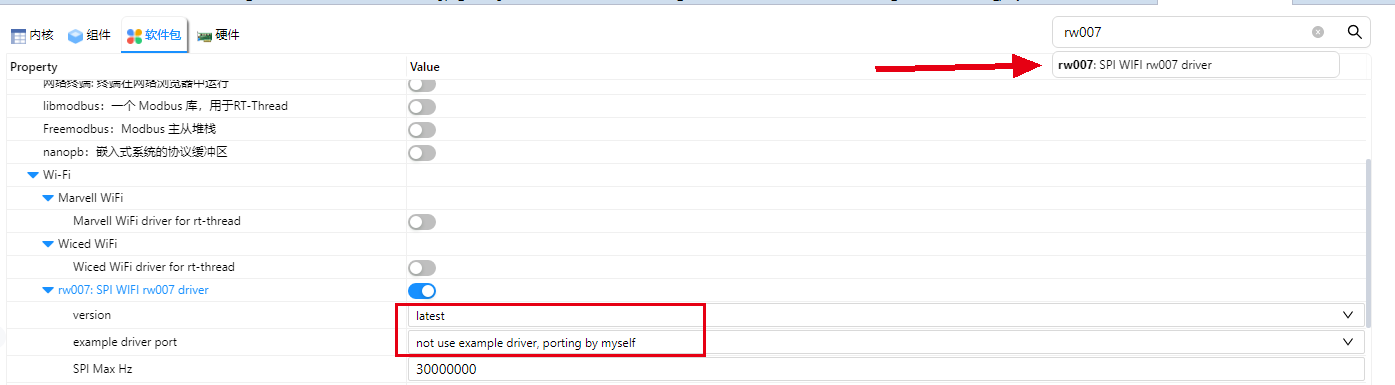
### 4.2 使用RT-Studio配置RW007软件包
点击左侧的RT-Thread Settings选项,弹出右侧的配置菜单,在搜索栏中输入RW007,选择`rw007:SPI WIFI rw007 driver `,相应配置参数如下:
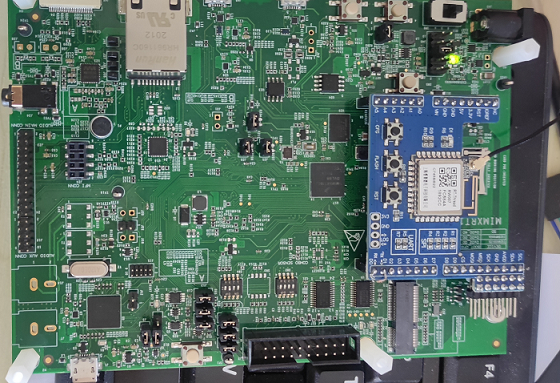
### 4.3 将RW007模块插入板载的arduino接口
### 4.4 修改RW007示例
RW007已经为IMXRT1062平台做了单独适配,文件目录在:`board/ports/rw007_port.c` 工程会自动加入此文件,因此无需修改即可简单适配。
### 4.5 编译工程,烧录固件。

`rw007 sn`与`rw007 ver`可以正常输出无乱码时,RW007驱动成功!
### 4.6 wifi联网测试
在shell中输入`wifi scan`命令搜索WIFI。

输入`wifi`,按`tab`键列出wifi相关命令:

连接目标wifi测试,使用ping命令测试是否连接成功:

至此MIMXRT1060-EVK的基础环境便搭建测试完毕!