1.Modify project directory structure
2.Add support for GPIO and UART peripherals 3.Add pin and serial device driver support 4.Put pictures in local folder 5.Modify README file
|
|
@ -1,44 +0,0 @@
|
||||||
/*******************************************************************************
|
|
||||||
* (c) Copyright 2014 Microsemi SoC Products Group. All rights reserved.
|
|
||||||
*
|
|
||||||
* Keil-MDK specific system initialization.
|
|
||||||
*
|
|
||||||
* SVN $Revision: 7375 $
|
|
||||||
* SVN $Date: 2015-05-01 14:57:40 +0100 (Fri, 01 May 2015) $
|
|
||||||
*/
|
|
||||||
#ifdef MSCC_NO_RELATIVE_PATHS
|
|
||||||
#include "m2sxxx.h"
|
|
||||||
#else
|
|
||||||
#include "..\m2sxxx.h"
|
|
||||||
#endif
|
|
||||||
|
|
||||||
#define ENVM_BASE_ADDRESS 0x60000000U
|
|
||||||
#define MDDR_BASE_ADDRESS 0xA0000000U
|
|
||||||
|
|
||||||
//extern unsigned int Image$$ER_RW$$Base;
|
|
||||||
//extern unsigned int Image$$ER_RO$$Base;
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* The __low_level_init() function is called after SystemInit. Therefore, the
|
|
||||||
* external RAM should be configured at this stage if it is used.
|
|
||||||
*/
|
|
||||||
/* void low_level_init(void)
|
|
||||||
{
|
|
||||||
volatile unsigned int rw_region_base;
|
|
||||||
volatile unsigned int readonly_region_base;
|
|
||||||
|
|
||||||
rw_region_base = (unsigned int)&Image$$ER_RW$$Base;
|
|
||||||
if (rw_region_base >= MDDR_BASE_ADDRESS)
|
|
||||||
{
|
|
||||||
/ --------------------------------------------------------------------------
|
|
||||||
* Remap MDDR to address 0x00000000.
|
|
||||||
/
|
|
||||||
SYSREG->ESRAM_CR = 0u;
|
|
||||||
SYSREG->ENVM_REMAP_BASE_CR = 0u;
|
|
||||||
SYSREG->DDR_CR = 1u;
|
|
||||||
}
|
|
||||||
|
|
||||||
readonly_region_base = (unsigned int)&Image$$ER_RO$$Base;
|
|
||||||
SCB->VTOR = readonly_region_base;
|
|
||||||
} */
|
|
||||||
|
|
||||||
|
|
@ -1,150 +0,0 @@
|
||||||
/*******************************************************************************
|
|
||||||
* (c) Copyright 2013 Microsemi SoC Products Group. All rights reserved.
|
|
||||||
*
|
|
||||||
* Redirection of the standard library I/O to one of the SmartFusion2
|
|
||||||
* MMUART.
|
|
||||||
*
|
|
||||||
* SVN $Revision: 7375 $
|
|
||||||
* SVN $Date: 2015-05-01 14:57:40 +0100 (Fri, 01 May 2015) $
|
|
||||||
*/
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* The content of this source file will only be compiled if either one of the
|
|
||||||
* following two defined symbols are defined in the project settings:
|
|
||||||
* - MICROSEMI_STDIO_THRU_MMUART0
|
|
||||||
* - MICROSEMI_STDIO_THRU_MMUART1
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
#ifdef MICROSEMI_STDIO_THRU_MMUART0
|
|
||||||
#ifndef MICROSEMI_STDIO_THRU_UART
|
|
||||||
#define MICROSEMI_STDIO_THRU_UART
|
|
||||||
#endif
|
|
||||||
#endif /* MICROSEMI_STDIO_THRU_MMUART0 */
|
|
||||||
|
|
||||||
#ifdef MICROSEMI_STDIO_THRU_MMUART1
|
|
||||||
#ifndef MICROSEMI_STDIO_THRU_UART
|
|
||||||
#define MICROSEMI_STDIO_THRU_UART
|
|
||||||
#endif
|
|
||||||
#endif /* MICROSEMI_STDIO_THRU_MMUART1 */
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* Actual implementation.
|
|
||||||
*/
|
|
||||||
#ifdef MICROSEMI_STDIO_THRU_UART
|
|
||||||
|
|
||||||
#include <stdio.h>
|
|
||||||
#include <rt_misc.h>
|
|
||||||
|
|
||||||
#include "m2sxxx.h"
|
|
||||||
#include "mss_uart.h"
|
|
||||||
#include "core_uart_apb.h"
|
|
||||||
|
|
||||||
|
|
||||||
/*
|
|
||||||
* The baud rate will default to 57600 baud if no baud rate is specified though the
|
|
||||||
* MICROSEMI_STDIO_BAUD_RATE define.
|
|
||||||
*/
|
|
||||||
#ifndef MICROSEMI_STDIO_BAUD_RATE
|
|
||||||
#define MICROSEMI_STDIO_BAUD_RATE MSS_UART_115200_BAUD
|
|
||||||
#endif
|
|
||||||
|
|
||||||
#ifdef MICROSEMI_STDIO_THRU_MMUART0
|
|
||||||
static mss_uart_instance_t * const gp_my_uart = &g_mss_uart0;
|
|
||||||
#else
|
|
||||||
static mss_uart_instance_t * const gp_my_uart = &g_mss_uart1;
|
|
||||||
#endif
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* Flag used to indicate if the UART driver needs to be initialized.
|
|
||||||
*/
|
|
||||||
static int g_stdio_uart_init_done = 0;
|
|
||||||
|
|
||||||
|
|
||||||
#define LSR_THRE_MASK 0x20u
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Disable semihosting apis
|
|
||||||
*/
|
|
||||||
#pragma import(__use_no_semihosting_swi)
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* sendchar()
|
|
||||||
*/
|
|
||||||
int sendchar(int ch)
|
|
||||||
{
|
|
||||||
uint32_t tx_ready;
|
|
||||||
//第一次调用时,初始化串口
|
|
||||||
if(!g_stdio_uart_init_done)
|
|
||||||
{
|
|
||||||
MSS_UART_init(gp_my_uart,
|
|
||||||
MICROSEMI_STDIO_BAUD_RATE,
|
|
||||||
MSS_UART_DATA_8_BITS | MSS_UART_NO_PARITY);
|
|
||||||
g_stdio_uart_init_done = 1;
|
|
||||||
}
|
|
||||||
do {
|
|
||||||
tx_ready = gp_my_uart->hw_reg->LSR & LSR_THRE_MASK;
|
|
||||||
} while(!tx_ready);
|
|
||||||
gp_my_uart->hw_reg->THR = ch;
|
|
||||||
return (ch);
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
struct __FILE { int handle; /* Add whatever you need here */ };
|
|
||||||
FILE __stdout;
|
|
||||||
FILE __stdin;
|
|
||||||
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* fputc()
|
|
||||||
*/
|
|
||||||
int fputc(int ch, FILE *f)
|
|
||||||
{
|
|
||||||
return (sendchar(ch));
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* fgetc()
|
|
||||||
*/
|
|
||||||
int fgetc(FILE *f)
|
|
||||||
{
|
|
||||||
uint8_t rx_size;
|
|
||||||
uint8_t rx_byte;
|
|
||||||
|
|
||||||
do {
|
|
||||||
rx_size = MSS_UART_get_rx(gp_my_uart, &rx_byte, 1);
|
|
||||||
} while(0u == rx_size);
|
|
||||||
|
|
||||||
return rx_byte;
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* ferror()
|
|
||||||
*/
|
|
||||||
int ferror(FILE *f)
|
|
||||||
{
|
|
||||||
/* Your implementation of ferror */
|
|
||||||
return EOF;
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* _ttywrch()
|
|
||||||
*/
|
|
||||||
void _ttywrch(int ch)
|
|
||||||
{
|
|
||||||
sendchar(ch);
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* _sys_exit()
|
|
||||||
*/
|
|
||||||
void _sys_exit(int return_code)
|
|
||||||
{
|
|
||||||
for(;;)
|
|
||||||
{
|
|
||||||
; /* endless loop */
|
|
||||||
}
|
|
||||||
}
|
|
||||||
|
|
||||||
#endif /* MICROSEMI_STDIO_THRU_UART */
|
|
||||||
|
|
@ -2,29 +2,41 @@
|
||||||
|
|
||||||
### 1. BSP简介
|
### 1. BSP简介
|
||||||
|
|
||||||
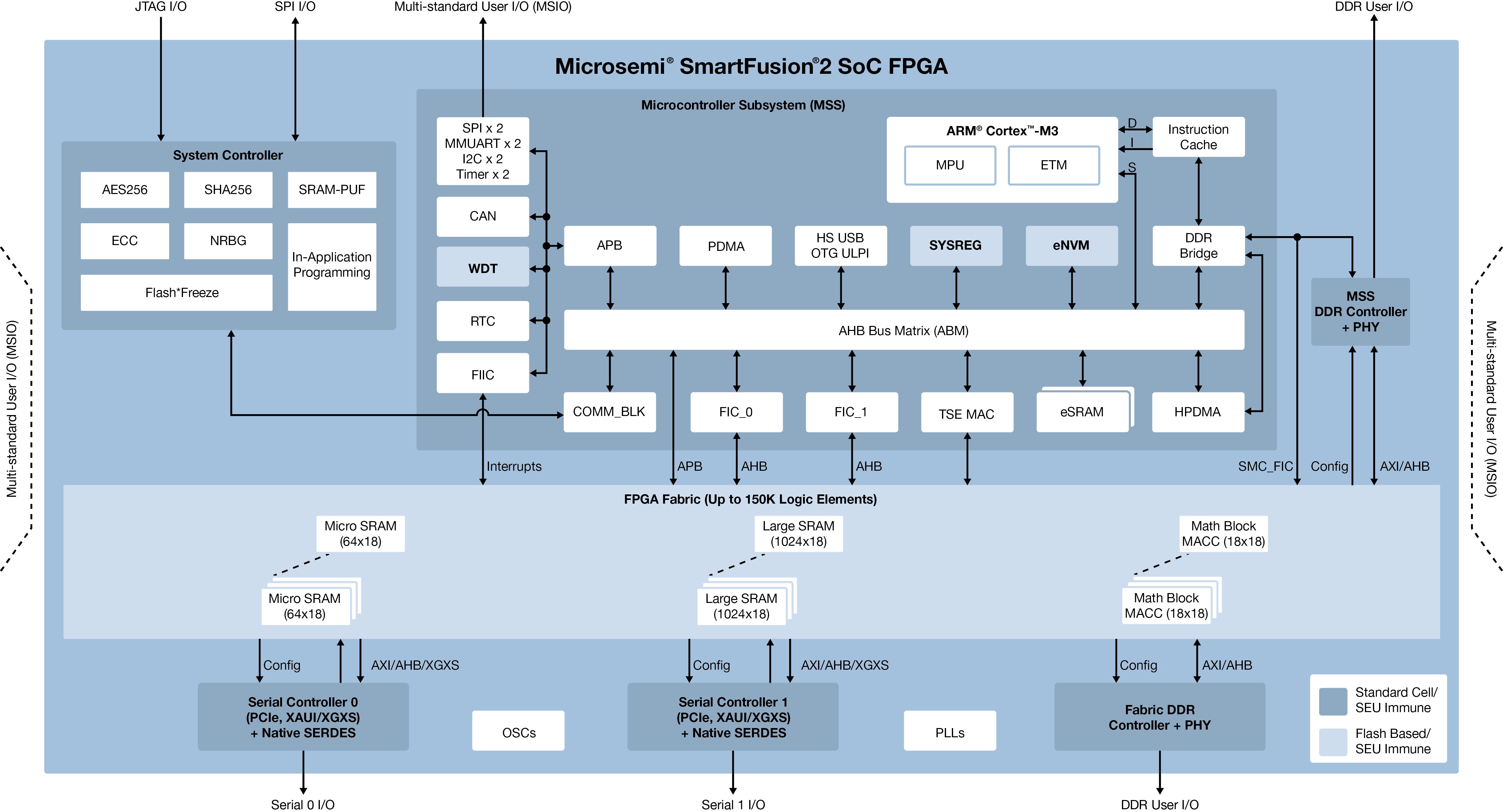
移植 RT-Thread 操作系统到 一款 **FPGA 芯片——M2S010** 上,该芯片属于 [Microsemi](https://www.microsemi.com/)(现Microchip)SmartFusion2系列,是一款**智能混合型FPGA**,片上除了 FPGA Fabric 逻辑部分,还包括一个 ARM® Cortex™-M3 内核的 MCU,主频最高 166MHz ,256KB eNVM,64KB eSRAM,集成GPIO、UART、I2C、SPI、CAN、USB等基本外设。
|
移植 RT-Thread 操作系统到一款 **FPGA 芯片——M2S010** ,该芯片属于 [Microsemi](https://www.microsemi.com/)(现Microchip)SmartFusion2系列,是一款**智能混合型FPGA**,片上除了 FPGA Fabric 逻辑部分,还包括一个 **ARM® Cortex™-M3 内核的 MCU**,主频最高 166MHz ,256KB eNVM,64KB eSRAM,集成GPIO、UART、I2C、SPI、CAN、USB等基本外设。
|
||||||
|
|
||||||
> 关于 Microsemi,第三大 FPGA 厂商,原 Actel 半导体,2010 年,Microsemi 收购 Actel,2018 年, Microchip 收购 Microsemi。
|
> 关于 Microsemi,第三大 FPGA 厂商,原 Actel 半导体,2010 年,Microsemi 收购 Actel,2018 年, Microchip 收购 Microsemi。
|
||||||
|
|
||||||
SmartFusion2 内部框图
|
SmartFusion2 内部框图
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
### 2. 使用说明
|
### 2. 外设支持
|
||||||
|
|
||||||
#### 2.1 FPGA 工程设计
|
移植了 RT-Thread 内核,支持线程调度、线程间同步和通信等,目前已经完成了PIN、Serial设备驱动,FinSH组件默认使用uart0设备。
|
||||||
|
|
||||||
|
| **片上外设** | **支持情况** | **备注** |
|
||||||
|
| :----------------- | :----------: | :------------------------------------- |
|
||||||
|
| GPIO | 支持 | GPIO_0/1输出,GPIO_2/3输入 |
|
||||||
|
| UART | 支持 | MMUART0 & MMUART1|
|
||||||
|
| SPI | 暂不支持 | |
|
||||||
|
| I2C | 暂不支持 | |
|
||||||
|
| RTC | 暂不支持 | |
|
||||||
|
| PWM | 暂不支持 | |
|
||||||
|
| USB | 暂不支持 | |
|
||||||
|
|
||||||
|
### 3. 使用说明
|
||||||
|
|
||||||
|
#### 3.1 FPGA 工程设计
|
||||||
|
|
||||||
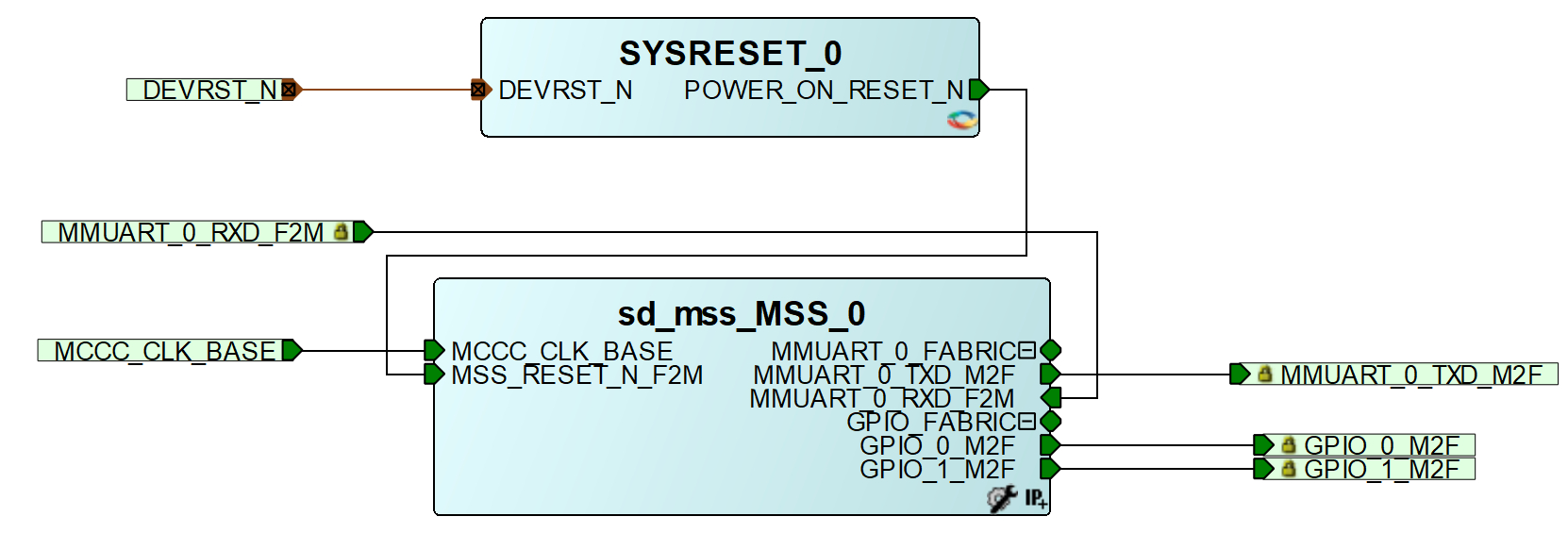
FPGA 部分使用 SmartDesign 图形化设计,不需要写 HDL 代码,时钟来自外部 50M 晶体输入,PLL 倍频 100M 提供给 MCU 使用,顶层配置如下图所示:
|
FPGA 部分使用 SmartDesign 图形化设计,不需要写 HDL 代码,时钟来自外部 50M 晶体输入,PLL 倍频 100M 提供给 MCU 使用,顶层配置如下图所示:
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
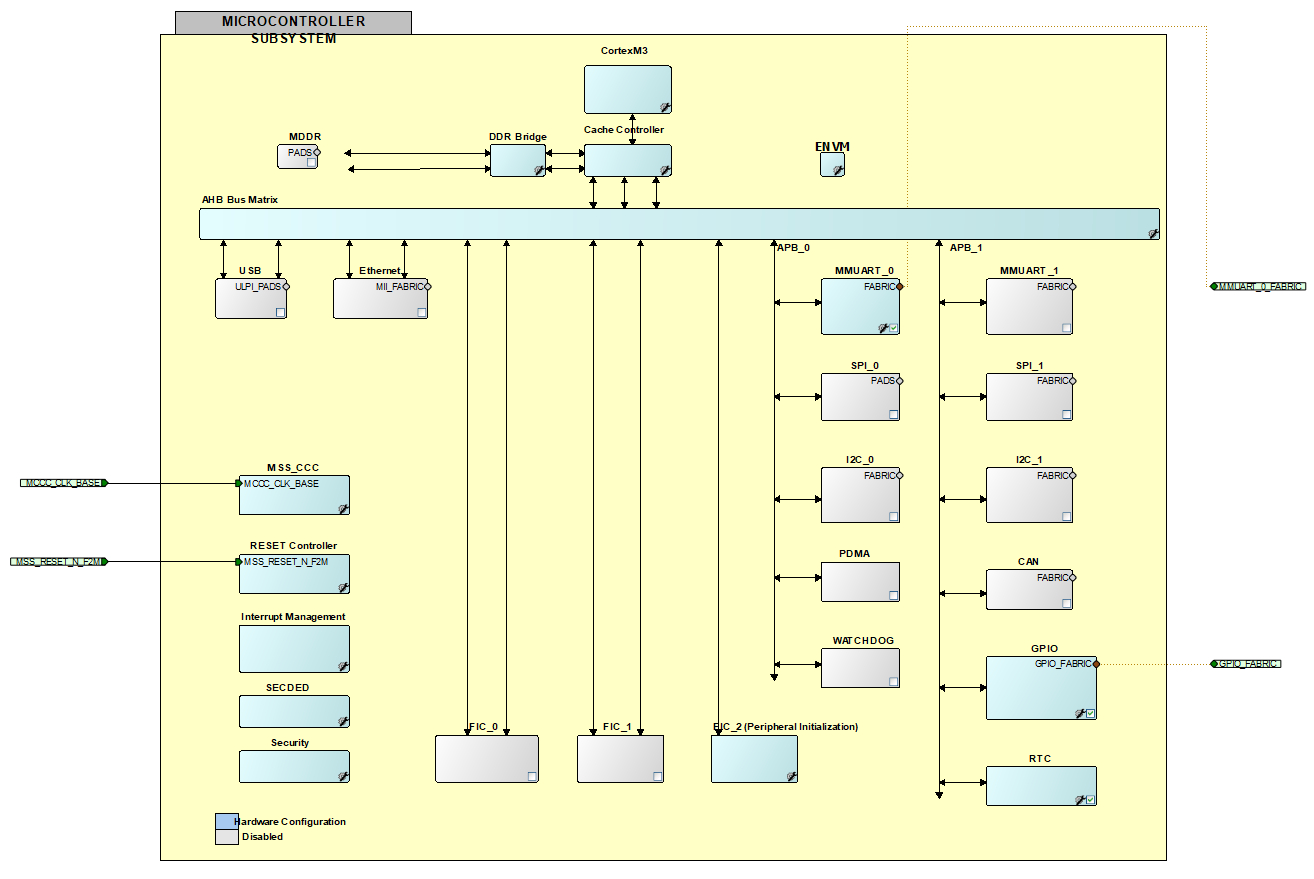
MSS 部分仅使用到了GPIO 和UART0,其他外设未启用,两个 GPIO 配置成输出模式:
|
MSS 部分仅使用到了GPIO 和UART,GPIO_0和GPIO_1配置成输出输出模式用于驱动LED,GPIO_2和GPIO_3配置成输入模式,用于读取按键输入。
|
||||||
|
|
||||||
|
配置完成的 FPGA 工程文件下载:[sf2_fpga_prj.rar](https://wcc-blog.oss-cn-beijing.aliyuncs.com/Libero/RT-Thread/sf2_fpga_prj.rar)
|
||||||
|
|
||||||
配置完成的 FPGA 工程文件下载:[fpga_project.rar](https://wcc-blog.oss-cn-beijing.aliyuncs.com/Libero/RT-Thread/fpga_project.rar)
|
#### 3.2 ARM 程序设计
|
||||||
|
|
||||||
#### 2.2 ARM 程序设计
|
|
||||||
|
|
||||||
ARM 程序使用 Keil MDK 5.26 开发,需要安装 M2S 系列芯片支持包:[Microsemi.M2Sxxx.1.0.64.pack](http://www.actel-ip.com/repositories/CMSIS-Pack/Microsemi.M2Sxxx.1.0.64.pack)
|
ARM 程序使用 Keil MDK 5.26 开发,需要安装 M2S 系列芯片支持包:[Microsemi.M2Sxxx.1.0.64.pack](http://www.actel-ip.com/repositories/CMSIS-Pack/Microsemi.M2Sxxx.1.0.64.pack)
|
||||||
|
|
||||||
|
|
@ -32,25 +44,24 @@ ARM 程序使用 Keil MDK 5.26 开发,需要安装 M2S 系列芯片支持包
|
||||||
|
|
||||||
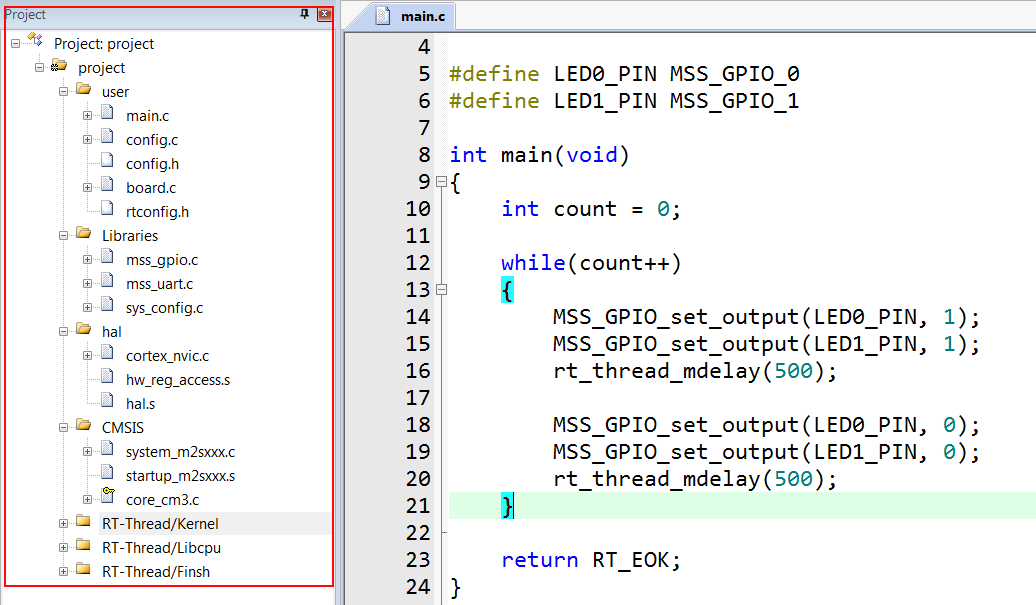
在官方生成的示例工程目录下,添加 RT-Thread 相关组件,并实现一些对接函数,最终的文件结构:
|
在官方生成的示例工程目录下,添加 RT-Thread 相关组件,并实现一些对接函数,最终的文件结构:
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
### 3. 下载和运行
|
### 4. 下载和运行
|
||||||
|
|
||||||
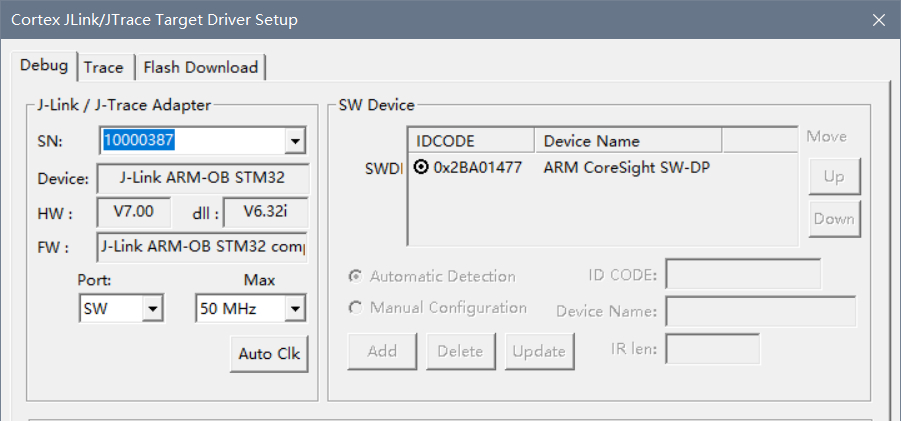
为了能使用 ARM 调试器连接到 ARM 内核,而不是 FPGA,需要把 JTAG_SEL 引脚置为低电平。使用 ARM 调试器,如 JLink,对应连接 JTAG 口的 TMS、TCK、GND 引脚,如果连接正常,可以检测到 ARM 芯片,如下图所示:
|
为了能使用 ARM 调试器连接到 ARM 内核,而不是 FPGA,需要把 JTAG_SEL 引脚置为低电平。使用 ARM 调试器,如 JLink,对应连接 JTAG 口的 TMS、TCK、GND 引脚,如果连接正常,可以检测到 ARM 芯片,如下图所示:
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
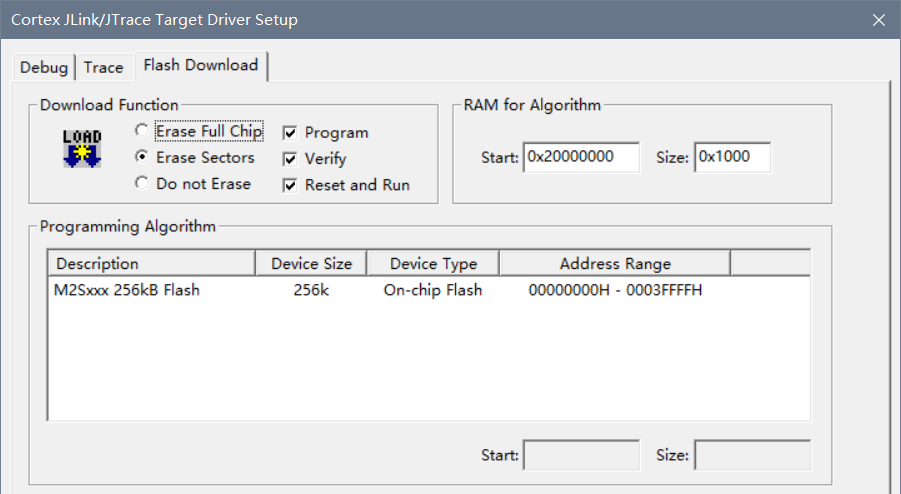
配置对应的 Flash 编程算法:
|
配置对应的 Flash 编程算法:
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
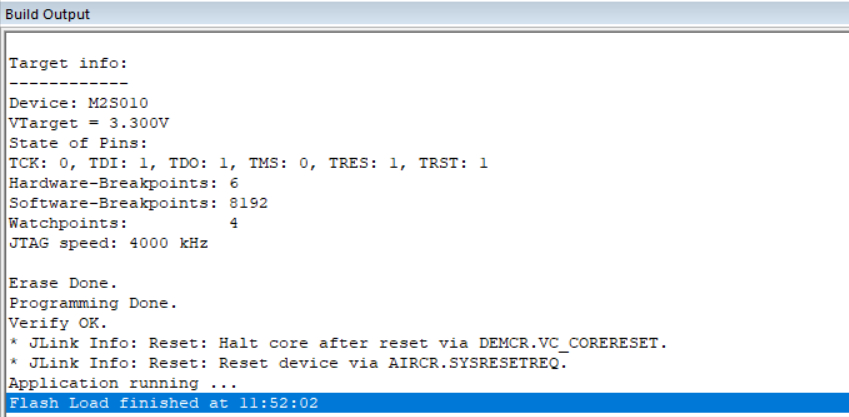
下载完成:
|
下载完成:
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
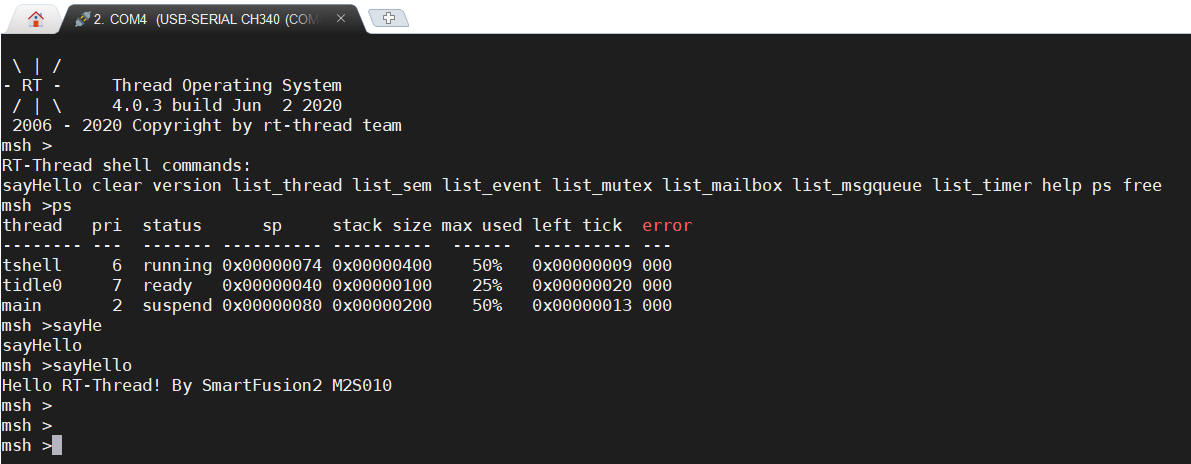
如果编译 & 烧写无误,下载完成或者按下复位按键之后,会在串口上看到 RT-Thread 的启动 LOG 信息:
|
如果编译 & 烧写无误,下载完成或者按下复位按键之后,会在串口上看到 RT-Thread 的启动 LOG 信息:
|
||||||
|
|
||||||
|
|
||||||
```c
|
```c
|
||||||
\ | /
|
\ | /
|
||||||
- RT - Thread Operating System
|
- RT - Thread Operating System
|
||||||
|
|
@ -59,20 +70,9 @@ ARM 程序使用 Keil MDK 5.26 开发,需要安装 M2S 系列芯片支持包
|
||||||
msh >
|
msh >
|
||||||
```
|
```
|
||||||
|
|
||||||
|

|
||||||
|
|
||||||
### 4. 外设支持
|
### 5. 注意事项
|
||||||
|
|
||||||
目前仅移植了 RT-Thread 内核,支持线程调度、线程间同步和通信等,支持 Finsh 组件,PIN、Serial 等设备驱动将会在以后添加。
|
|
||||||
|
|
||||||
### 5. 资料下载
|
|
||||||
|
|
||||||
独立的工程文件下载:
|
|
||||||
|
|
||||||
- FPGA 工程下载:[fpga_project.rar](https://wcc-blog.oss-cn-beijing.aliyuncs.com/Libero/RT-Thread/fpga_project.rar)
|
|
||||||
- ARM 工程下载:[smartfusion_rtt-master-4.0.3.rar](https://wcc-blog.oss-cn-beijing.aliyuncs.com/Libero/RT-Thread/smartfusion_rtt-master-4.0.3.rar)
|
|
||||||
|
|
||||||
### 6. 注意事项
|
|
||||||
|
|
||||||
- FPGA 开发环境基于 Libero V11.8.2.4,向上兼容,不支持低版本 IDE。
|
- FPGA 开发环境基于 Libero V11.8.2.4,向上兼容,不支持低版本 IDE。
|
||||||
- ARM 开发环境基于 Keil MDK 5.26,如果使用SoftConsole IDE ,需要修改 `libcpu` 内的文件。
|
- ARM 开发环境基于 Keil MDK 5.26,如果使用SoftConsole IDE ,需要修改 `libcpu` 内的文件。
|
||||||
|
|
@ -80,13 +80,12 @@ msh >
|
||||||
- 使用 SoftConsole 开发环境可以直接使用官方的 Flash Pro 调试器进行 ARM 程序的调试。
|
- 使用 SoftConsole 开发环境可以直接使用官方的 Flash Pro 调试器进行 ARM 程序的调试。
|
||||||
- 内核时钟需要和 FPGA 中 MSS 配置的对应,Libero 自动生成的时钟文件,可以直接替换`bsp\smartfusion2\libraries\sys_config`文件夹下的文件 。
|
- 内核时钟需要和 FPGA 中 MSS 配置的对应,Libero 自动生成的时钟文件,可以直接替换`bsp\smartfusion2\libraries\sys_config`文件夹下的文件 。
|
||||||
|
|
||||||
### 7. 参考资料
|
### 6. 参考资料
|
||||||
|
|
||||||
- [学习路线 - RT-Thread 文档中心](https://www.rt-thread.org/document/site/)
|
- [学习路线 - RT-Thread 文档中心](https://www.rt-thread.org/document/site/)
|
||||||
- [Microsemi Libero系列中文教程](https://blog.csdn.net/whik1194/article/details/102901710)
|
- [Microsemi Libero系列中文教程](https://blog.csdn.net/whik1194/article/details/102901710)
|
||||||
|
|
||||||
### 8. 联系我
|
### 7. 联系我
|
||||||
|
|
||||||
- 邮箱:wangchao149@foxmail.com
|
- Github:[whik](https://github.com/whik)
|
||||||
- 主页:www.wangchaochao.top
|
- E-Mail:wangchao149@foxmail.com
|
||||||
- 微信:wcc149
|
|
||||||
|
|
|
||||||
|
|
@ -0,0 +1,38 @@
|
||||||
|
#include <rthw.h>
|
||||||
|
#include <rtthread.h>
|
||||||
|
#include <rtdevice.h>
|
||||||
|
|
||||||
|
#define LED0_PIN 0
|
||||||
|
#define LED1_PIN 1
|
||||||
|
#define SW0_PIN 2
|
||||||
|
#define SW1_PIN 3
|
||||||
|
|
||||||
|
extern void sw0_isr(void *args);
|
||||||
|
extern void sw1_isr(void *args);
|
||||||
|
|
||||||
|
int main(void)
|
||||||
|
{
|
||||||
|
int count = 1;
|
||||||
|
|
||||||
|
rt_pin_attach_irq(SW0_PIN, PIN_IRQ_MODE_RISING, sw0_isr, RT_NULL);
|
||||||
|
rt_pin_attach_irq(SW1_PIN, PIN_IRQ_MODE_RISING, sw1_isr, RT_NULL);
|
||||||
|
|
||||||
|
rt_pin_irq_enable(SW0_PIN, PIN_IRQ_ENABLE);
|
||||||
|
rt_pin_irq_enable(SW1_PIN, PIN_IRQ_ENABLE);
|
||||||
|
|
||||||
|
rt_pin_mode(LED0_PIN, PIN_MODE_OUTPUT);
|
||||||
|
rt_pin_mode(LED1_PIN, PIN_MODE_OUTPUT);
|
||||||
|
|
||||||
|
while(count++)
|
||||||
|
{
|
||||||
|
rt_pin_write(LED0_PIN, PIN_HIGH);
|
||||||
|
rt_pin_write(LED1_PIN, PIN_HIGH);
|
||||||
|
rt_thread_mdelay(100);
|
||||||
|
|
||||||
|
rt_pin_write(LED0_PIN, PIN_LOW);
|
||||||
|
rt_pin_write(LED1_PIN, PIN_LOW);
|
||||||
|
rt_thread_mdelay(100);
|
||||||
|
}
|
||||||
|
|
||||||
|
return RT_EOK;
|
||||||
|
}
|
||||||
|
|
@ -20,13 +20,7 @@
|
||||||
#define _SYSTICK_CALIB (*(rt_uint32_t *)(_SCB_BASE + 0xC))
|
#define _SYSTICK_CALIB (*(rt_uint32_t *)(_SCB_BASE + 0xC))
|
||||||
#define _SYSTICK_PRI (*(rt_uint8_t *)(0xE000ED23UL))
|
#define _SYSTICK_PRI (*(rt_uint8_t *)(0xE000ED23UL))
|
||||||
|
|
||||||
// Updates the variable SystemCoreClock and must be called
|
|
||||||
// whenever the core clock is changed during program execution.
|
|
||||||
extern void SystemCoreClockUpdate(void);
|
extern void SystemCoreClockUpdate(void);
|
||||||
|
|
||||||
// Holds the system core clock, which is the system clock
|
|
||||||
// frequency supplied to the SysTick timer and the processor
|
|
||||||
// core clock.
|
|
||||||
extern uint32_t SystemCoreClock;
|
extern uint32_t SystemCoreClock;
|
||||||
|
|
||||||
static uint32_t _SysTick_Config(rt_uint32_t ticks)
|
static uint32_t _SysTick_Config(rt_uint32_t ticks)
|
||||||
|
|
@ -66,14 +60,16 @@ void rt_hw_board_init()
|
||||||
|
|
||||||
/* System Tick Configuration */
|
/* System Tick Configuration */
|
||||||
_SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
|
_SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
|
||||||
|
|
||||||
/* Call components board initial (use INIT_BOARD_EXPORT()) */
|
/* Call components board initial (use INIT_BOARD_EXPORT()) */
|
||||||
#ifdef RT_USING_COMPONENTS_INIT
|
#ifdef RT_USING_COMPONENTS_INIT
|
||||||
rt_components_board_init();
|
rt_components_board_init();
|
||||||
#endif
|
#endif
|
||||||
//#ifdef RT_USING_CONSOLE
|
|
||||||
// rt_console_set_device(RT_CONSOLE_DEVICE_NAME);
|
#ifdef RT_USING_CONSOLE
|
||||||
//#endif
|
rt_console_set_device(RT_CONSOLE_DEVICE_NAME);
|
||||||
|
#endif
|
||||||
|
|
||||||
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
|
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
|
||||||
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
|
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
|
||||||
#endif
|
#endif
|
||||||
|
|
@ -0,0 +1,29 @@
|
||||||
|
#include "config.h"
|
||||||
|
|
||||||
|
void sw0_isr(void *args)
|
||||||
|
{
|
||||||
|
rt_kprintf("sw_0 is trigger \r\n");
|
||||||
|
rt_thread_mdelay(400);
|
||||||
|
}
|
||||||
|
|
||||||
|
void sw1_isr(void *args)
|
||||||
|
{
|
||||||
|
rt_kprintf("sw_1 is trigger \r\n");
|
||||||
|
rt_thread_mdelay(400);
|
||||||
|
}
|
||||||
|
/* hardware initialization */
|
||||||
|
void boardInit(void)
|
||||||
|
{
|
||||||
|
/* disable watchdog timer */
|
||||||
|
SYSREG->WDOG_CR = 0;
|
||||||
|
}
|
||||||
|
INIT_BOARD_EXPORT(boardInit);
|
||||||
|
|
||||||
|
/* custom finish command */
|
||||||
|
extern uint32_t SystemCoreClock;
|
||||||
|
void sayHello(void)
|
||||||
|
{
|
||||||
|
rt_kprintf("Hello RT-Thread! By Microsemi SmartFusion2 Family FPGA-M2S010.\r\n");
|
||||||
|
rt_kprintf("MSS System Core Clock: %d Hz.\r\n", SystemCoreClock);
|
||||||
|
}
|
||||||
|
MSH_CMD_EXPORT(sayHello, "say hello to console");
|
||||||
|
|
@ -0,0 +1,15 @@
|
||||||
|
#ifndef __CONFIG_H__
|
||||||
|
#define __CONFIG_H__
|
||||||
|
|
||||||
|
#include "mss_gpio.h"
|
||||||
|
#include "mss_uart.h"
|
||||||
|
|
||||||
|
#include <rthw.h>
|
||||||
|
#include <rtthread.h>
|
||||||
|
|
||||||
|
void sw0_isr(void *args);
|
||||||
|
void sw1_isr(void *args);
|
||||||
|
void boardInit(void);
|
||||||
|
void sayHello(void);
|
||||||
|
|
||||||
|
#endif
|
||||||
|
|
@ -12,6 +12,11 @@ del *.map /s
|
||||||
del *.lst /s
|
del *.lst /s
|
||||||
del *.dep /s
|
del *.dep /s
|
||||||
del *.build_log.htm /s
|
del *.build_log.htm /s
|
||||||
del *.bak
|
del *.bak /s
|
||||||
|
del *.sct /s
|
||||||
|
del *.axf /s
|
||||||
|
|
||||||
|
del JLinkLog.txt /s
|
||||||
|
del SConscript /s
|
||||||
|
|
||||||
echo 编译产生的其他文件已经删除
|
echo 编译产生的其他文件已经删除
|
||||||
|
|
|
||||||
|
|
@ -0,0 +1,434 @@
|
||||||
|
#include <rtthread.h>
|
||||||
|
#include <rtdevice.h>
|
||||||
|
#include <rthw.h>
|
||||||
|
|
||||||
|
#include "mss_gpio.h"
|
||||||
|
#include "drv_gpio.h"
|
||||||
|
|
||||||
|
#ifdef BSP_USING_GPIO
|
||||||
|
|
||||||
|
static struct rt_pin_irq_hdr sf2_pin_irq_hdr_tab[] =
|
||||||
|
{
|
||||||
|
/* pin, hdr, mode, args */
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
{-1, 0, RT_NULL, RT_NULL},
|
||||||
|
};
|
||||||
|
|
||||||
|
/* configure an individual GPIO port */
|
||||||
|
static void sf2_pin_mode(rt_device_t dev, rt_base_t pin, rt_base_t mode)
|
||||||
|
{
|
||||||
|
uint32_t config;
|
||||||
|
switch (mode)
|
||||||
|
{
|
||||||
|
case PIN_MODE_OUTPUT:
|
||||||
|
config = MSS_GPIO_OUTPUT_MODE;
|
||||||
|
break;
|
||||||
|
case PIN_MODE_INPUT:
|
||||||
|
config = MSS_GPIO_INPUT_MODE;
|
||||||
|
break;
|
||||||
|
default:
|
||||||
|
config = MSS_GPIO_INOUT_MODE;
|
||||||
|
break;
|
||||||
|
}
|
||||||
|
MSS_GPIO_config((mss_gpio_id_t )pin, config);
|
||||||
|
}
|
||||||
|
|
||||||
|
static int sf2_pin_read(rt_device_t dev, rt_base_t pin)
|
||||||
|
{
|
||||||
|
uint32_t value;
|
||||||
|
value = MSS_GPIO_get_inputs() & (1<<pin);
|
||||||
|
return ((value) ? PIN_HIGH : PIN_LOW);
|
||||||
|
}
|
||||||
|
|
||||||
|
static void sf2_pin_write(rt_device_t dev, rt_base_t pin, rt_base_t value)
|
||||||
|
{
|
||||||
|
if (value == PIN_HIGH)
|
||||||
|
MSS_GPIO_set_output((mss_gpio_id_t )pin, 1);
|
||||||
|
else
|
||||||
|
MSS_GPIO_set_output((mss_gpio_id_t )pin, 0);
|
||||||
|
}
|
||||||
|
|
||||||
|
static rt_err_t sf2_pin_attach_irq(struct rt_device *device, rt_int32_t pin,
|
||||||
|
rt_uint32_t mode, void (*hdr)(void *args), void *args)
|
||||||
|
{
|
||||||
|
rt_base_t level;
|
||||||
|
|
||||||
|
level = rt_hw_interrupt_disable();
|
||||||
|
|
||||||
|
if (sf2_pin_irq_hdr_tab[pin].pin == pin &&
|
||||||
|
sf2_pin_irq_hdr_tab[pin].hdr == hdr &&
|
||||||
|
sf2_pin_irq_hdr_tab[pin].mode == mode &&
|
||||||
|
sf2_pin_irq_hdr_tab[pin].args == args)
|
||||||
|
{
|
||||||
|
rt_hw_interrupt_enable(level);
|
||||||
|
return RT_EOK;
|
||||||
|
}
|
||||||
|
if (sf2_pin_irq_hdr_tab[pin].pin != -1)
|
||||||
|
{
|
||||||
|
rt_hw_interrupt_enable(level);
|
||||||
|
return -RT_EBUSY;
|
||||||
|
}
|
||||||
|
sf2_pin_irq_hdr_tab[pin].pin = pin;
|
||||||
|
sf2_pin_irq_hdr_tab[pin].hdr = hdr;
|
||||||
|
sf2_pin_irq_hdr_tab[pin].mode = mode;
|
||||||
|
sf2_pin_irq_hdr_tab[pin].args = args;
|
||||||
|
|
||||||
|
rt_hw_interrupt_enable(level);
|
||||||
|
|
||||||
|
return RT_EOK;
|
||||||
|
}
|
||||||
|
|
||||||
|
static rt_err_t sf2_pin_detach_irq(struct rt_device *device, rt_int32_t pin)
|
||||||
|
{
|
||||||
|
rt_base_t level;
|
||||||
|
|
||||||
|
level = rt_hw_interrupt_disable();
|
||||||
|
|
||||||
|
if (sf2_pin_irq_hdr_tab[pin].pin == -1)
|
||||||
|
{
|
||||||
|
rt_hw_interrupt_enable(level);
|
||||||
|
return RT_EOK;
|
||||||
|
}
|
||||||
|
|
||||||
|
sf2_pin_irq_hdr_tab[pin].pin = -1;
|
||||||
|
sf2_pin_irq_hdr_tab[pin].hdr = RT_NULL;
|
||||||
|
sf2_pin_irq_hdr_tab[pin].mode = 0;
|
||||||
|
sf2_pin_irq_hdr_tab[pin].args = RT_NULL;
|
||||||
|
|
||||||
|
rt_hw_interrupt_enable(level);
|
||||||
|
|
||||||
|
return RT_EOK;
|
||||||
|
}
|
||||||
|
|
||||||
|
static rt_err_t sf2_pin_irq_enable(struct rt_device *device, rt_base_t pin, rt_uint32_t enabled)
|
||||||
|
{
|
||||||
|
uint32_t mode;
|
||||||
|
rt_base_t level;
|
||||||
|
|
||||||
|
if (enabled == PIN_IRQ_ENABLE)
|
||||||
|
{
|
||||||
|
level = rt_hw_interrupt_disable();
|
||||||
|
if (sf2_pin_irq_hdr_tab[pin].pin == -1)
|
||||||
|
{
|
||||||
|
rt_hw_interrupt_enable(level);
|
||||||
|
return -RT_ENOSYS;
|
||||||
|
}
|
||||||
|
switch(sf2_pin_irq_hdr_tab[pin].mode)
|
||||||
|
{
|
||||||
|
case PIN_IRQ_MODE_RISING :
|
||||||
|
mode = MSS_GPIO_IRQ_EDGE_POSITIVE;
|
||||||
|
break;
|
||||||
|
case PIN_IRQ_MODE_FALLING :
|
||||||
|
mode = MSS_GPIO_IRQ_EDGE_NEGATIVE;
|
||||||
|
break;
|
||||||
|
case PIN_IRQ_MODE_RISING_FALLING:
|
||||||
|
mode = MSS_GPIO_IRQ_EDGE_BOTH;
|
||||||
|
break;
|
||||||
|
case PIN_IRQ_MODE_HIGH_LEVEL :
|
||||||
|
mode = MSS_GPIO_IRQ_LEVEL_HIGH;
|
||||||
|
break;
|
||||||
|
case PIN_IRQ_MODE_LOW_LEVEL:
|
||||||
|
mode = MSS_GPIO_IRQ_LEVEL_LOW;
|
||||||
|
break;
|
||||||
|
}
|
||||||
|
MSS_GPIO_config((mss_gpio_id_t )pin, MSS_GPIO_INPUT_MODE | mode);
|
||||||
|
MSS_GPIO_enable_irq((mss_gpio_id_t )pin);
|
||||||
|
|
||||||
|
rt_hw_interrupt_enable(level);
|
||||||
|
}
|
||||||
|
else if (enabled == PIN_IRQ_DISABLE)
|
||||||
|
{
|
||||||
|
MSS_GPIO_config((mss_gpio_id_t )pin, MSS_GPIO_INPUT_MODE);
|
||||||
|
MSS_GPIO_disable_irq((mss_gpio_id_t )pin);
|
||||||
|
}
|
||||||
|
else
|
||||||
|
return -RT_ENOSYS;
|
||||||
|
|
||||||
|
return RT_EOK;
|
||||||
|
}
|
||||||
|
|
||||||
|
static const struct rt_pin_ops sf2_pin_ops =
|
||||||
|
{
|
||||||
|
sf2_pin_mode,
|
||||||
|
sf2_pin_write,
|
||||||
|
sf2_pin_read,
|
||||||
|
sf2_pin_attach_irq,
|
||||||
|
sf2_pin_detach_irq,
|
||||||
|
sf2_pin_irq_enable
|
||||||
|
};
|
||||||
|
|
||||||
|
|
||||||
|
int rt_hw_pin_init(void)
|
||||||
|
{
|
||||||
|
rt_err_t result = RT_EOK;
|
||||||
|
MSS_GPIO_init();
|
||||||
|
result = rt_device_pin_register("pin", &sf2_pin_ops, RT_NULL);
|
||||||
|
RT_ASSERT(result == RT_EOK);
|
||||||
|
return result;
|
||||||
|
}
|
||||||
|
INIT_BOARD_EXPORT(rt_hw_pin_init);
|
||||||
|
|
||||||
|
rt_inline void pin_irq_hdr(int pin)
|
||||||
|
{
|
||||||
|
MSS_GPIO_clear_irq((mss_gpio_id_t )pin);
|
||||||
|
|
||||||
|
if (sf2_pin_irq_hdr_tab[pin].hdr)
|
||||||
|
sf2_pin_irq_hdr_tab[pin].hdr(sf2_pin_irq_hdr_tab[pin].args);
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO0_IRQHandler( void )
|
||||||
|
{
|
||||||
|
/* enter interrupt */
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(0);
|
||||||
|
/* leave interrupt */
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO1_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(1);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO2_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(2);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO3_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(3);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO4_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(4);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO5_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(5);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO6_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(6);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
void GPIO7_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(7);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO8_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(8);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO9_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(9);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO10_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(10);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO11_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(11);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO12_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(12);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO13_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(13);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO14_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(14);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO15_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(15);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO16_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(16);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO17_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(17);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO18_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(18);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO19_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(19);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO20_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(20);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO21_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(21);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO22_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(22);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO23_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(23);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO24_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(24);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO25_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(25);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO26_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(26);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO27_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(27);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO28_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(28);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO29_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(29);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO30_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(30);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
void GPIO31_IRQHandler( void )
|
||||||
|
{
|
||||||
|
rt_interrupt_enter();
|
||||||
|
pin_irq_hdr(31);
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
#endif
|
||||||
|
|
@ -0,0 +1,8 @@
|
||||||
|
#ifndef __DRV_GPIO_H__
|
||||||
|
#define __DRV_GPIO_H__
|
||||||
|
|
||||||
|
int rt_hw_pin_init(void);
|
||||||
|
|
||||||
|
#endif
|
||||||
|
|
||||||
|
|
||||||
|
|
@ -0,0 +1,180 @@
|
||||||
|
#include <rthw.h>
|
||||||
|
#include <rtthread.h>
|
||||||
|
#include <rtdevice.h>
|
||||||
|
|
||||||
|
#include "drv_uart.h"
|
||||||
|
|
||||||
|
struct sf2_uart
|
||||||
|
{
|
||||||
|
mss_uart_instance_t *uart;
|
||||||
|
IRQn_Type irq;
|
||||||
|
};
|
||||||
|
|
||||||
|
struct sf2_uart uart0=
|
||||||
|
{
|
||||||
|
&g_mss_uart0,
|
||||||
|
UART0_IRQn,
|
||||||
|
};
|
||||||
|
struct rt_serial_device serial0;
|
||||||
|
|
||||||
|
void uart0_rx_handler(mss_uart_instance_t *this_uart)
|
||||||
|
{
|
||||||
|
/* enter interrupt */
|
||||||
|
rt_interrupt_enter();
|
||||||
|
rt_hw_serial_isr(&serial0, RT_SERIAL_EVENT_RX_IND);
|
||||||
|
/* leave interrupt */
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
|
||||||
|
struct sf2_uart uart1=
|
||||||
|
{
|
||||||
|
&g_mss_uart1,
|
||||||
|
UART1_IRQn,
|
||||||
|
};
|
||||||
|
|
||||||
|
struct rt_serial_device serial1;
|
||||||
|
void uart1_rx_handler(mss_uart_instance_t *this_uart)
|
||||||
|
{
|
||||||
|
/* enter interrupt */
|
||||||
|
rt_interrupt_enter();
|
||||||
|
rt_hw_serial_isr(&serial1, RT_SERIAL_EVENT_RX_IND);
|
||||||
|
/* leave interrupt */
|
||||||
|
rt_interrupt_leave();
|
||||||
|
}
|
||||||
|
static rt_err_t sf2_uart_configure(struct rt_serial_device *serial,
|
||||||
|
struct serial_configure *cfg)
|
||||||
|
{
|
||||||
|
uint32_t baudRate;
|
||||||
|
uint8_t datBits, parity, stopBits;
|
||||||
|
uint8_t config;
|
||||||
|
struct sf2_uart *uart;
|
||||||
|
|
||||||
|
RT_ASSERT(serial != RT_NULL);
|
||||||
|
RT_ASSERT(cfg != RT_NULL);
|
||||||
|
|
||||||
|
uart = (struct sf2_uart *)serial->parent.user_data;
|
||||||
|
|
||||||
|
switch(cfg->data_bits)
|
||||||
|
{
|
||||||
|
case DATA_BITS_5: datBits = MSS_UART_DATA_5_BITS; break;
|
||||||
|
case DATA_BITS_6: datBits = MSS_UART_DATA_6_BITS; break;
|
||||||
|
case DATA_BITS_7: datBits = MSS_UART_DATA_7_BITS; break;
|
||||||
|
case DATA_BITS_8: datBits = MSS_UART_DATA_8_BITS; break;
|
||||||
|
default: datBits = MSS_UART_DATA_8_BITS; break;
|
||||||
|
}
|
||||||
|
switch(cfg->parity)
|
||||||
|
{
|
||||||
|
case PARITY_NONE: parity = MSS_UART_NO_PARITY; break;
|
||||||
|
case PARITY_EVEN: parity = MSS_UART_EVEN_PARITY; break;
|
||||||
|
case PARITY_ODD : parity = MSS_UART_ODD_PARITY; break;
|
||||||
|
default : parity = MSS_UART_NO_PARITY; break;
|
||||||
|
}
|
||||||
|
switch(cfg->stop_bits)
|
||||||
|
{
|
||||||
|
case STOP_BITS_1: stopBits = MSS_UART_ONE_STOP_BIT; break;
|
||||||
|
case STOP_BITS_2: stopBits = MSS_UART_TWO_STOP_BITS; break;
|
||||||
|
case STOP_BITS_3: stopBits = MSS_UART_ONEHALF_STOP_BIT; break;
|
||||||
|
default : stopBits = MSS_UART_ONE_STOP_BIT;
|
||||||
|
}
|
||||||
|
|
||||||
|
baudRate = cfg->baud_rate;
|
||||||
|
config = datBits | parity | stopBits;
|
||||||
|
|
||||||
|
MSS_UART_init(uart->uart, baudRate, config);
|
||||||
|
if(uart->uart == &g_mss_uart0)
|
||||||
|
MSS_UART_set_rx_handler(uart->uart, uart0_rx_handler, MSS_UART_FIFO_SINGLE_BYTE);
|
||||||
|
else
|
||||||
|
MSS_UART_set_rx_handler(uart->uart, uart1_rx_handler, MSS_UART_FIFO_SINGLE_BYTE);
|
||||||
|
|
||||||
|
return RT_EOK;
|
||||||
|
}
|
||||||
|
|
||||||
|
static rt_err_t sf2_uart_control(struct rt_serial_device *serial,
|
||||||
|
int cmd, void *arg)
|
||||||
|
{
|
||||||
|
struct sf2_uart* uart;
|
||||||
|
|
||||||
|
RT_ASSERT(serial != RT_NULL);
|
||||||
|
uart = (struct sf2_uart*)serial->parent.user_data;
|
||||||
|
|
||||||
|
switch (cmd)
|
||||||
|
{
|
||||||
|
case RT_DEVICE_CTRL_CLR_INT:
|
||||||
|
NVIC_DisableIRQ(uart->irq);
|
||||||
|
break;
|
||||||
|
case RT_DEVICE_CTRL_SET_INT:
|
||||||
|
NVIC_EnableIRQ(uart->irq);
|
||||||
|
break;
|
||||||
|
}
|
||||||
|
|
||||||
|
return RT_EOK;
|
||||||
|
}
|
||||||
|
|
||||||
|
static int sf2_uart_putc(struct rt_serial_device *serial, char c)
|
||||||
|
{
|
||||||
|
struct sf2_uart* uart;
|
||||||
|
uint32_t tx_ready;
|
||||||
|
|
||||||
|
RT_ASSERT(serial != RT_NULL);
|
||||||
|
|
||||||
|
uart = (struct sf2_uart*)serial->parent.user_data;
|
||||||
|
|
||||||
|
do {
|
||||||
|
tx_ready = uart->uart->hw_reg->LSR & 0x20u;
|
||||||
|
} while(!tx_ready);
|
||||||
|
uart->uart->hw_reg->THR = c;
|
||||||
|
|
||||||
|
return 1;
|
||||||
|
}
|
||||||
|
|
||||||
|
static int sf2_uart_getc(struct rt_serial_device *serial)
|
||||||
|
{
|
||||||
|
int ch = -1;
|
||||||
|
uint8_t err_status;
|
||||||
|
struct sf2_uart* uart;
|
||||||
|
|
||||||
|
RT_ASSERT(serial != RT_NULL);
|
||||||
|
uart = (struct sf2_uart*)serial->parent.user_data;
|
||||||
|
|
||||||
|
err_status = MSS_UART_get_rx_status(uart->uart);
|
||||||
|
if(MSS_UART_NO_ERROR == err_status)
|
||||||
|
MSS_UART_get_rx(uart->uart, (uint8_t *)&ch, 1);
|
||||||
|
|
||||||
|
return ch;
|
||||||
|
}
|
||||||
|
|
||||||
|
static const struct rt_uart_ops sf2_uart_ops =
|
||||||
|
{
|
||||||
|
sf2_uart_configure,
|
||||||
|
sf2_uart_control,
|
||||||
|
sf2_uart_putc,
|
||||||
|
sf2_uart_getc,
|
||||||
|
};
|
||||||
|
|
||||||
|
|
||||||
|
int rt_hw_uart_init(void)
|
||||||
|
{
|
||||||
|
rt_err_t result = RT_EOK;
|
||||||
|
struct sf2_uart* uart;
|
||||||
|
struct serial_configure config = RT_SERIAL_CONFIG_DEFAULT;
|
||||||
|
|
||||||
|
#ifdef BSP_USING_UART0
|
||||||
|
uart = &uart0;
|
||||||
|
serial0.ops = &sf2_uart_ops;
|
||||||
|
/* default config: 115200, 8, no, 1 */
|
||||||
|
serial0.config = config;
|
||||||
|
result = rt_hw_serial_register(&serial0, "uart0", RT_DEVICE_FLAG_RDWR | RT_DEVICE_FLAG_INT_RX, uart);
|
||||||
|
RT_ASSERT(result == RT_EOK);
|
||||||
|
#endif
|
||||||
|
|
||||||
|
#ifdef BSP_USING_UART1
|
||||||
|
uart = &uart1;
|
||||||
|
serial1.ops = &sf2_uart_ops;
|
||||||
|
/* default config: 115200, 8, no, 1 */
|
||||||
|
serial1.config = config;
|
||||||
|
result = rt_hw_serial_register(&serial1, "uart1", RT_DEVICE_FLAG_RDWR | RT_DEVICE_FLAG_INT_RX, uart);
|
||||||
|
RT_ASSERT(result == RT_EOK);
|
||||||
|
#endif
|
||||||
|
return result;
|
||||||
|
}
|
||||||
|
INIT_BOARD_EXPORT(rt_hw_uart_init);
|
||||||
|
|
@ -0,0 +1,11 @@
|
||||||
|
#ifndef __DRV_UART_H__
|
||||||
|
#define __DRV_UART_H__
|
||||||
|
|
||||||
|
#include "mss_uart.h"
|
||||||
|
void uart_rx_handler(mss_uart_instance_t *this_uart);
|
||||||
|
|
||||||
|
void uart0_rx_handler(mss_uart_instance_t * this_uart);
|
||||||
|
void uart1_rx_handler(mss_uart_instance_t * this_uart);
|
||||||
|
int rt_hw_uart_init(void);
|
||||||
|
|
||||||
|
#endif
|
||||||
{kind=link}
|
After Width: | Height: | Size: 1007 KiB |
{kind=link}
|
After Width: | Height: | Size: 581 KiB |
{kind=link}
|
After Width: | Height: | Size: 158 KiB |
{kind=link}
|
After Width: | Height: | Size: 154 KiB |
{kind=link}
|
After Width: | Height: | Size: 152 KiB |
{kind=link}
|
After Width: | Height: | Size: 260 KiB |
{kind=link}
|
After Width: | Height: | Size: 492 KiB |
|
|
@ -1,30 +0,0 @@
|
||||||
/*******************************************************************************
|
|
||||||
* (c) Copyright 2007-2013 Microsemi SoC Products Group. All rights reserved.
|
|
||||||
*
|
|
||||||
* SVN $Revision: 5258 $
|
|
||||||
* SVN $Date: 2013-03-21 18:11:02 +0530 (Thu, 21 Mar 2013) $
|
|
||||||
*/
|
|
||||||
#ifndef __CPU_TYPES_H
|
|
||||||
#define __CPU_TYPES_H 1
|
|
||||||
|
|
||||||
#include <stdint.h>
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*/
|
|
||||||
typedef unsigned int size_t;
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
* addr_t: address type.
|
|
||||||
* Used to specify the address of peripherals present in the processor's memory
|
|
||||||
* map.
|
|
||||||
*/
|
|
||||||
typedef unsigned int addr_t;
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
* psr_t: processor state register.
|
|
||||||
* Used by HAL_disable_interrupts() and HAL_restore_interrupts() to store the
|
|
||||||
* processor's state between disabling and restoring interrupts.
|
|
||||||
*/
|
|
||||||
typedef unsigned int psr_t;
|
|
||||||
|
|
||||||
#endif /* __CPU_TYPES_H */
|
|
||||||
|
|
@ -1,32 +0,0 @@
|
||||||
;-------------------------------------------------------------------------------
|
|
||||||
; (c) Copyright 2007-2013 Microsemi SoC Products Group. All rights reserved.
|
|
||||||
;
|
|
||||||
; Interrupt disabling/restoration for critical section protection.
|
|
||||||
;
|
|
||||||
; SVN $Revision: 5261 $
|
|
||||||
; SVN $Date: 2013-03-21 19:52:41 +0530 (Thu, 21 Mar 2013) $
|
|
||||||
;
|
|
||||||
AREA |.text|, CODE, READONLY
|
|
||||||
EXPORT HAL_disable_interrupts
|
|
||||||
EXPORT HAL_restore_interrupts
|
|
||||||
|
|
||||||
;-------------------------------------------------------------------------------
|
|
||||||
;
|
|
||||||
;
|
|
||||||
HAL_disable_interrupts \
|
|
||||||
PROC
|
|
||||||
mrs r0, PRIMASK
|
|
||||||
cpsid I
|
|
||||||
bx lr
|
|
||||||
ENDP
|
|
||||||
|
|
||||||
;-------------------------------------------------------------------------------
|
|
||||||
;
|
|
||||||
;
|
|
||||||
HAL_restore_interrupts \
|
|
||||||
PROC
|
|
||||||
msr PRIMASK, r0
|
|
||||||
bx lr
|
|
||||||
ENDP
|
|
||||||
|
|
||||||
END
|
|
||||||
|
|
@ -1,96 +0,0 @@
|
||||||
/*******************************************************************************
|
|
||||||
* (c) Copyright 2007-2013 Microsemi SoC Products Group. All rights reserved.
|
|
||||||
*
|
|
||||||
* Hardware registers access macros.
|
|
||||||
*
|
|
||||||
* THE MACROS DEFINED IN THIS FILE ARE DEPRECATED. DO NOT USED FOR NEW
|
|
||||||
* DEVELOPMENT.
|
|
||||||
*
|
|
||||||
* These macros are used to access peripheral's registers. They allow access to
|
|
||||||
* 8, 16 and 32 bit wide registers. All accesses to peripheral registers should
|
|
||||||
* be done through these macros in order to ease porting accross different
|
|
||||||
* processors/bus architectures.
|
|
||||||
*
|
|
||||||
* Some of these macros also allow to access a specific register field.
|
|
||||||
*
|
|
||||||
* SVN $Revision: 5258 $
|
|
||||||
* SVN $Date: 2013-03-21 18:11:02 +0530 (Thu, 21 Mar 2013) $
|
|
||||||
*/
|
|
||||||
#ifndef __HW_REGISTER_MACROS_H
|
|
||||||
#define __HW_REGISTER_MACROS_H 1
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
* 32 bits registers access:
|
|
||||||
*/
|
|
||||||
#define HW_get_uint32_reg(BASE_ADDR, REG_OFFSET) (*((uint32_t volatile *)(BASE_ADDR + REG_OFFSET##_REG_OFFSET)))
|
|
||||||
|
|
||||||
#define HW_set_uint32_reg(BASE_ADDR, REG_OFFSET, VALUE) (*((uint32_t volatile *)(BASE_ADDR + REG_OFFSET##_REG_OFFSET)) = (VALUE))
|
|
||||||
|
|
||||||
#define HW_set_uint32_reg_field(BASE_ADDR, FIELD, VALUE) \
|
|
||||||
(*((uint32_t volatile *)(BASE_ADDR + FIELD##_OFFSET)) = \
|
|
||||||
( \
|
|
||||||
(uint32_t) \
|
|
||||||
( \
|
|
||||||
(*((uint32_t volatile *)(BASE_ADDR + FIELD##_OFFSET))) & ~FIELD##_MASK) | \
|
|
||||||
(uint32_t)(((VALUE) << FIELD##_SHIFT) & FIELD##_MASK) \
|
|
||||||
) \
|
|
||||||
)
|
|
||||||
|
|
||||||
#define HW_get_uint32_reg_field( BASE_ADDR, FIELD ) \
|
|
||||||
(( (*((uint32_t volatile *)(BASE_ADDR + FIELD##_OFFSET))) & FIELD##_MASK) >> FIELD##_SHIFT)
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
* 32 bits memory access:
|
|
||||||
*/
|
|
||||||
#define HW_get_uint32(BASE_ADDR) (*((uint32_t volatile *)(BASE_ADDR)))
|
|
||||||
|
|
||||||
#define HW_set_uint32(BASE_ADDR, VALUE) (*((uint32_t volatile *)(BASE_ADDR)) = (VALUE))
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
* 16 bits registers access:
|
|
||||||
*/
|
|
||||||
#define HW_get_uint16_reg(BASE_ADDR, REG_OFFSET) (*((uint16_t volatile *)(BASE_ADDR + REG_OFFSET##_REG_OFFSET)))
|
|
||||||
|
|
||||||
#define HW_set_uint16_reg(BASE_ADDR, REG_OFFSET, VALUE) (*((uint16_t volatile *)(BASE_ADDR + REG_OFFSET##_REG_OFFSET)) = (VALUE))
|
|
||||||
|
|
||||||
#define HW_set_uint16_reg_field(BASE_ADDR, FIELD, VALUE) \
|
|
||||||
(*((uint16_t volatile *)(BASE_ADDR + FIELD##_OFFSET)) = \
|
|
||||||
( \
|
|
||||||
(uint16_t) \
|
|
||||||
( \
|
|
||||||
(*((uint16_t volatile *)(BASE_ADDR + FIELD##_OFFSET))) & ~FIELD##_MASK) | \
|
|
||||||
(uint16_t)(((VALUE) << FIELD##_SHIFT) & FIELD##_MASK) \
|
|
||||||
) \
|
|
||||||
)
|
|
||||||
|
|
||||||
#define HW_get_uint16_reg_field( BASE_ADDR, FIELD ) \
|
|
||||||
(( (*((uint16_t volatile *)(BASE_ADDR + FIELD##_OFFSET))) & FIELD##_MASK) >> FIELD##_SHIFT)
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
* 8 bits registers access:
|
|
||||||
*/
|
|
||||||
#define HW_get_uint8_reg(BASE_ADDR, REG_OFFSET) (*((uint8_t volatile *)(BASE_ADDR + REG_OFFSET##_REG_OFFSET)))
|
|
||||||
|
|
||||||
#define HW_set_uint8_reg(BASE_ADDR, REG_OFFSET, VALUE) (*((uint8_t volatile *)(BASE_ADDR + REG_OFFSET##_REG_OFFSET)) = (VALUE))
|
|
||||||
|
|
||||||
#define HW_set_uint8_reg_field(BASE_ADDR, FIELD, VALUE) \
|
|
||||||
(*((uint8_t volatile *)(BASE_ADDR + FIELD##_OFFSET)) = \
|
|
||||||
( \
|
|
||||||
(uint8_t) \
|
|
||||||
( \
|
|
||||||
(*((uint8_t volatile *)(BASE_ADDR + FIELD##_OFFSET))) & ~FIELD##_MASK) | \
|
|
||||||
(uint8_t)(((VALUE) << FIELD##_SHIFT) & FIELD##_MASK) \
|
|
||||||
) \
|
|
||||||
)
|
|
||||||
|
|
||||||
#define HW_get_uint8_reg_field( BASE_ADDR, FIELD ) \
|
|
||||||
(( (*((uint8_t volatile *)(BASE_ADDR + FIELD##_OFFSET))) & FIELD##_MASK) >> FIELD##_SHIFT)
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
* 8 bits memory access:
|
|
||||||
*/
|
|
||||||
#define HW_get_uint8(BASE_ADDR) (*((uint8_t volatile *)(BASE_ADDR)))
|
|
||||||
|
|
||||||
#define HW_set_uint8(BASE_ADDR, VALUE) (*((uint8_t volatile *)(BASE_ADDR)) = (VALUE))
|
|
||||||
|
|
||||||
#endif /* __HW_REGISTER_MACROS_H */
|
|
||||||
|
|
@ -1,209 +0,0 @@
|
||||||
/*******************************************************************************
|
|
||||||
* (c) Copyright 2007-2013 Microsemi SoC Products Group. All rights reserved.
|
|
||||||
*
|
|
||||||
* Legacy Actel HAL Cortex NVIC control functions.
|
|
||||||
* The use of these functions should be replaced by calls to the equivalent
|
|
||||||
* CMSIS function in your application code.
|
|
||||||
*
|
|
||||||
* SVN $Revision: 7375 $
|
|
||||||
* SVN $Date: 2015-05-01 19:27:40 +0530 (Fri, 01 May 2015) $
|
|
||||||
*/
|
|
||||||
#include "cortex_nvic.h"
|
|
||||||
#ifdef MSCC_NO_RELATIVE_PATHS
|
|
||||||
#include "mss_assert.h"
|
|
||||||
#else
|
|
||||||
#include "../../CMSIS/mss_assert.h"
|
|
||||||
#endif
|
|
||||||
|
|
||||||
|
|
||||||
/***************************************************************************//**
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_init( void )
|
|
||||||
{
|
|
||||||
/*
|
|
||||||
* Please use the NVIC control functions provided by the SmartFusion2 CMSIS
|
|
||||||
* Hardware Abstraction Layer. The use of the Actel HAL NVIC control
|
|
||||||
* functions is obsolete on SmartFusion2 devices.
|
|
||||||
*
|
|
||||||
* Simply remove the call to NVIC_init() from your application code.
|
|
||||||
*/
|
|
||||||
ASSERT(0);
|
|
||||||
}
|
|
||||||
|
|
||||||
/***************************************************************************//**
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_set_handler
|
|
||||||
(
|
|
||||||
uint32_t interrupt_number,
|
|
||||||
hal_nvic_irq_handler_t handler
|
|
||||||
)
|
|
||||||
{
|
|
||||||
/*
|
|
||||||
* Please use the NVIC control functions provided by the SmartFusion2 CMSIS
|
|
||||||
* Hardware Abstraction Layer. The use of the Actel HAL NVIC control
|
|
||||||
* functions is obsolete on SmartFusion2 devices.
|
|
||||||
*
|
|
||||||
* Please remove the call to NVIC_set_handler() from your application code
|
|
||||||
* and provide a function using one of the following function prototypes to
|
|
||||||
* handle interrupts from peripherals implemeted in the SmartFusion2 FPGA
|
|
||||||
* fabric:
|
|
||||||
* - void FabricIrq0_IRQHandler(void)
|
|
||||||
* - void FabricIrq1_IRQHandler(void)
|
|
||||||
* - void FabricIrq2_IRQHandler(void)
|
|
||||||
* - void FabricIrq3_IRQHandler(void)
|
|
||||||
* - void FabricIrq4_IRQHandler(void)
|
|
||||||
* - void FabricIrq5_IRQHandler(void)
|
|
||||||
* - void FabricIrq6_IRQHandler(void)
|
|
||||||
* - void FabricIrq7_IRQHandler(void)
|
|
||||||
* - void FabricIrq8_IRQHandler(void)
|
|
||||||
* - void FabricIrq9_IRQHandler(void)
|
|
||||||
* - void FabricIrq10_IRQHandler(void)
|
|
||||||
* - void FabricIrq11_IRQHandler(void)
|
|
||||||
* - void FabricIrq12_IRQHandler(void)
|
|
||||||
* - void FabricIrq13_IRQHandler(void)
|
|
||||||
* - void FabricIrq14_IRQHandler(void)
|
|
||||||
* - void FabricIrq15_IRQHandler(void)
|
|
||||||
* The function to implement depends on which MSS_INT_F2M[n] signal is used
|
|
||||||
* in your Libero design to connect the interrupt signal of the peripheral
|
|
||||||
* generating the interrupt.
|
|
||||||
*/
|
|
||||||
ASSERT(0);
|
|
||||||
}
|
|
||||||
|
|
||||||
/***************************************************************************//**
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_set_priority
|
|
||||||
(
|
|
||||||
uint32_t interrupt_number,
|
|
||||||
uint8_t priority_level
|
|
||||||
)
|
|
||||||
{
|
|
||||||
/*
|
|
||||||
* Please use the NVIC control functions provided by the SmartFusion2 CMSIS
|
|
||||||
* Hardware Abstraction Layer. The use of the Actel HAL NVIC control
|
|
||||||
* functions is obsolete on SmartFusion2 devices.
|
|
||||||
*
|
|
||||||
* Please replace calls to NVIC_set_priority() with a call to the CMSIS
|
|
||||||
* void NVIC_SetPriority(IRQn_Type IRQn, uint32_t priority) function where
|
|
||||||
* IRQn is one of the following values:
|
|
||||||
* - FabricIrq0_IRQn
|
|
||||||
* - FabricIrq1_IRQn
|
|
||||||
* - FabricIrq2_IRQn
|
|
||||||
* - FabricIrq3_IRQn
|
|
||||||
* - FabricIrq4_IRQn
|
|
||||||
* - FabricIrq5_IRQn
|
|
||||||
* - FabricIrq6_IRQn
|
|
||||||
* - FabricIrq7_IRQn
|
|
||||||
* - FabricIrq8_IRQn
|
|
||||||
* - FabricIrq9_IRQn
|
|
||||||
* - FabricIrq10_IRQn
|
|
||||||
* - FabricIrq11_IRQn
|
|
||||||
* - FabricIrq12_IRQn
|
|
||||||
* - FabricIrq13_IRQn
|
|
||||||
* - FabricIrq14_IRQn
|
|
||||||
* - FabricIrq15_IRQn
|
|
||||||
*/
|
|
||||||
ASSERT(0);
|
|
||||||
}
|
|
||||||
|
|
||||||
/***************************************************************************//**
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_enable_interrupt( uint32_t interrupt_number )
|
|
||||||
{
|
|
||||||
/*
|
|
||||||
* Please use the NVIC control functions provided by the SmartFusion2 CMSIS
|
|
||||||
* Hardware Abstraction Layer. The use of the Actel HAL NVIC control
|
|
||||||
* functions is obsolete on SmartFusion2 devices.
|
|
||||||
*
|
|
||||||
* Please replace calls to NVIC_enable_interrupt() with a call to the CMSIS
|
|
||||||
* void NVIC_EnableIRQ(IRQn_Type IRQn) function where IRQn is one of the
|
|
||||||
* following values:
|
|
||||||
* - FabricIrq0_IRQn
|
|
||||||
* - FabricIrq1_IRQn
|
|
||||||
* - FabricIrq2_IRQn
|
|
||||||
* - FabricIrq3_IRQn
|
|
||||||
* - FabricIrq4_IRQn
|
|
||||||
* - FabricIrq5_IRQn
|
|
||||||
* - FabricIrq6_IRQn
|
|
||||||
* - FabricIrq7_IRQn
|
|
||||||
* - FabricIrq8_IRQn
|
|
||||||
* - FabricIrq9_IRQn
|
|
||||||
* - FabricIrq10_IRQn
|
|
||||||
* - FabricIrq11_IRQn
|
|
||||||
* - FabricIrq12_IRQn
|
|
||||||
* - FabricIrq13_IRQn
|
|
||||||
* - FabricIrq14_IRQn
|
|
||||||
* - FabricIrq15_IRQn
|
|
||||||
*/
|
|
||||||
ASSERT(0);
|
|
||||||
}
|
|
||||||
|
|
||||||
/***************************************************************************//**
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_disable_interrupt( uint32_t interrupt_number )
|
|
||||||
{
|
|
||||||
/*
|
|
||||||
* Please use the NVIC control functions provided by the SmartFusion2 CMSIS
|
|
||||||
* Hardware Abstraction Layer. The use of the Actel HAL NVIC control
|
|
||||||
* functions is obsolete on SmartFusion2 devices.
|
|
||||||
*
|
|
||||||
* Please replace calls to NVIC_disable_interrupt() with a call to the CMSIS
|
|
||||||
* void NVIC_DisableIRQ(IRQn_Type IRQn) function where IRQn is one of the
|
|
||||||
* following values:
|
|
||||||
* - FabricIrq0_IRQn
|
|
||||||
* - FabricIrq1_IRQn
|
|
||||||
* - FabricIrq2_IRQn
|
|
||||||
* - FabricIrq3_IRQn
|
|
||||||
* - FabricIrq4_IRQn
|
|
||||||
* - FabricIrq5_IRQn
|
|
||||||
* - FabricIrq6_IRQn
|
|
||||||
* - FabricIrq7_IRQn
|
|
||||||
* - FabricIrq8_IRQn
|
|
||||||
* - FabricIrq9_IRQn
|
|
||||||
* - FabricIrq10_IRQn
|
|
||||||
* - FabricIrq11_IRQn
|
|
||||||
* - FabricIrq12_IRQn
|
|
||||||
* - FabricIrq13_IRQn
|
|
||||||
* - FabricIrq14_IRQn
|
|
||||||
* - FabricIrq15_IRQn
|
|
||||||
*/
|
|
||||||
ASSERT(0);
|
|
||||||
}
|
|
||||||
|
|
||||||
/***************************************************************************//**
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_clear_interrupt( uint32_t interrupt_number )
|
|
||||||
{
|
|
||||||
/*
|
|
||||||
* Please use the NVIC control functions provided by the SmartFusion2 CMSIS
|
|
||||||
* Hardware Abstraction Layer. The use of the Actel HAL NVIC control
|
|
||||||
* functions is obsolete on SmartFusion2 devices.
|
|
||||||
*
|
|
||||||
* Please replace calls to NVIC_clear_interrupt() with a call to the CMSIS
|
|
||||||
* void NVIC_ClearPendingIRQ(IRQn_Type IRQn) function where IRQn is one of the
|
|
||||||
* following values:
|
|
||||||
* - FabricIrq0_IRQn
|
|
||||||
* - FabricIrq1_IRQn
|
|
||||||
* - FabricIrq2_IRQn
|
|
||||||
* - FabricIrq3_IRQn
|
|
||||||
* - FabricIrq4_IRQn
|
|
||||||
* - FabricIrq5_IRQn
|
|
||||||
* - FabricIrq6_IRQn
|
|
||||||
* - FabricIrq7_IRQn
|
|
||||||
* - FabricIrq8_IRQn
|
|
||||||
* - FabricIrq9_IRQn
|
|
||||||
* - FabricIrq10_IRQn
|
|
||||||
* - FabricIrq11_IRQn
|
|
||||||
* - FabricIrq12_IRQn
|
|
||||||
* - FabricIrq13_IRQn
|
|
||||||
* - FabricIrq14_IRQn
|
|
||||||
* - FabricIrq15_IRQn
|
|
||||||
*/
|
|
||||||
ASSERT(0);
|
|
||||||
}
|
|
||||||
|
|
@ -1,56 +0,0 @@
|
||||||
/*******************************************************************************
|
|
||||||
* (c) Copyright 2007-2013 Microsemi SoC Products Group. All rights reserved.
|
|
||||||
*
|
|
||||||
* Legacy Actel HAL Cortex NVIC control functions.
|
|
||||||
* The use of these functions should be replaced by calls to the equivalent
|
|
||||||
* CMSIS function in your application code.
|
|
||||||
*
|
|
||||||
* SVN $Revision: 5257 $
|
|
||||||
* SVN $Date: 2013-03-21 17:54:10 +0530 (Thu, 21 Mar 2013) $
|
|
||||||
*/
|
|
||||||
#ifndef CORTEX_NVIC_H_
|
|
||||||
#define CORTEX_NVIC_H_
|
|
||||||
|
|
||||||
#include <stdint.h>
|
|
||||||
|
|
||||||
typedef void (*hal_nvic_irq_handler_t)(void);
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_init( void );
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_set_handler
|
|
||||||
(
|
|
||||||
uint32_t interrupt_number,
|
|
||||||
hal_nvic_irq_handler_t handler
|
|
||||||
);
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_set_priority
|
|
||||||
(
|
|
||||||
uint32_t interrupt_number,
|
|
||||||
uint8_t priority_level
|
|
||||||
);
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_enable_interrupt( uint32_t interrupt_number );
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_disable_interrupt( uint32_t interrupt_number );
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void NVIC_clear_interrupt( uint32_t interrupt_number );
|
|
||||||
|
|
||||||
#endif /*CORTEX_NVIC_H_*/
|
|
||||||
|
|
@ -1,752 +0,0 @@
|
||||||
/*******************************************************************************
|
|
||||||
* (c) Copyright 2012-2016 Microsemi SoC Products Group. All rights reserved.
|
|
||||||
*
|
|
||||||
* SmartFusion2 COMBLK access functions.
|
|
||||||
*
|
|
||||||
* SVN $Revision: 8345 $
|
|
||||||
* SVN $Date: 2016-03-23 11:53:04 +0530 (Wed, 23 Mar 2016) $
|
|
||||||
*/
|
|
||||||
|
|
||||||
#include "mss_comblk.h"
|
|
||||||
#include "../../CMSIS/mss_assert.h"
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
* Control register bit masks.
|
|
||||||
*/
|
|
||||||
#define CR_FLUSHOUT_MASK 0x01u
|
|
||||||
#define CR_FLUSHIN_MASK 0x02u
|
|
||||||
#define CR_SIZETX_MASK 0x04u
|
|
||||||
#define CR_ENABLE_MASK 0x10u
|
|
||||||
#define CR_LOOPBACK_MASK 0x20u
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
* Status and interrupt enable registers bit masks.
|
|
||||||
*/
|
|
||||||
#define TXTOKAY_MASK 0x01u
|
|
||||||
#define RCVOKAY_MASK 0x02u
|
|
||||||
#define TXOVERFLOW_MASK 0x04u
|
|
||||||
#define RXUNDERFLOW_MASK 0x08u
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
* DATA8 register bit masks.
|
|
||||||
*/
|
|
||||||
#define DATA8_COMMAND_MASK 0x8000u
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
* COMBLK driver states.
|
|
||||||
*/
|
|
||||||
#define COMBLK_IDLE 0u
|
|
||||||
#define COMBLK_TX_CMD 1u
|
|
||||||
#define COMBLK_TX_DATA 2u
|
|
||||||
#define COMBLK_WAIT_RESPONSE 3u
|
|
||||||
#define COMBLK_RX_RESPONSE 4u
|
|
||||||
#define COMBLK_TX_PAGED_DATA 5u
|
|
||||||
|
|
||||||
#define POR_DIGEST_ERROR_OPCODE 0xF1u
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* COMBLK interrupt service routine.
|
|
||||||
*/
|
|
||||||
void ComBlk_IRQHandler(void);
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* Local functions.
|
|
||||||
*/
|
|
||||||
static void abort_current_cmd(void);
|
|
||||||
static void send_cmd_opcode(uint8_t opcode);
|
|
||||||
static uint32_t fill_tx_fifo(const uint8_t * p_cmd, uint32_t cmd_size);
|
|
||||||
static void handle_tx_okay_irq(void);
|
|
||||||
static void handle_rx_okay_irq(void);
|
|
||||||
static void complete_request(uint16_t response_length);
|
|
||||||
static void process_sys_ctrl_command(uint8_t cmd_opcode);
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* Global variables:
|
|
||||||
*/
|
|
||||||
static volatile uint8_t g_comblk_cmd_opcode = 0u;
|
|
||||||
static const uint8_t * g_comblk_p_cmd = 0u;
|
|
||||||
static volatile uint16_t g_comblk_cmd_size = 0u;
|
|
||||||
static const uint8_t * g_comblk_p_data = 0u;
|
|
||||||
static volatile uint32_t g_comblk_data_size = 0u;
|
|
||||||
static uint8_t * g_comblk_p_response = 0u;
|
|
||||||
static uint16_t g_comblk_response_size = 0u;
|
|
||||||
static volatile uint16_t g_comblk_response_idx = 0u;
|
|
||||||
static comblk_completion_handler_t g_comblk_completion_handler = 0;
|
|
||||||
static uint32_t (*g_comblk_page_handler)(uint8_t const ** pp_next_page) = 0;
|
|
||||||
static volatile uint8_t g_request_in_progress = 0u;
|
|
||||||
static uint8_t g_comblk_state = COMBLK_IDLE;
|
|
||||||
static volatile comblk_async_event_handler_t g_async_event_handler = 0;
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void MSS_COMBLK_init
|
|
||||||
(
|
|
||||||
comblk_async_event_handler_t async_event_handler,
|
|
||||||
uint8_t* p_response
|
|
||||||
)
|
|
||||||
{
|
|
||||||
/*
|
|
||||||
* Disable and clear previous interrupts.
|
|
||||||
*/
|
|
||||||
NVIC_DisableIRQ(ComBlk_IRQn);
|
|
||||||
COMBLK->INT_ENABLE = 0u;
|
|
||||||
NVIC_ClearPendingIRQ(ComBlk_IRQn);
|
|
||||||
|
|
||||||
g_async_event_handler = async_event_handler;
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Initialize COMBLK driver state variables:
|
|
||||||
*/
|
|
||||||
g_request_in_progress = 0u;
|
|
||||||
g_comblk_cmd_opcode = 0u;
|
|
||||||
g_comblk_p_cmd = 0u;
|
|
||||||
g_comblk_cmd_size = 0u;
|
|
||||||
g_comblk_p_data = 0u;
|
|
||||||
g_comblk_data_size = 0u;
|
|
||||||
g_comblk_p_response = p_response;
|
|
||||||
g_comblk_response_size = 0u;
|
|
||||||
g_comblk_response_idx = 0u;
|
|
||||||
g_comblk_completion_handler = 0;
|
|
||||||
|
|
||||||
g_comblk_state = COMBLK_IDLE;
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Disable loopback before enabling the MSS COMM_BLK to ensure that any
|
|
||||||
* codes waiting in the TX FIFO of the System Controller’s COMM_BLK are
|
|
||||||
* not lost.
|
|
||||||
*/
|
|
||||||
COMBLK->CONTROL &= ~CR_LOOPBACK_MASK;
|
|
||||||
COMBLK->CONTROL |= CR_ENABLE_MASK;
|
|
||||||
|
|
||||||
/*--------------------------------------------------------------------------
|
|
||||||
* Enable receive interrupt to receive asynchronous events from the system
|
|
||||||
* controller.
|
|
||||||
*/
|
|
||||||
COMBLK->INT_ENABLE &= ~TXTOKAY_MASK;
|
|
||||||
COMBLK->INT_ENABLE |= RCVOKAY_MASK;
|
|
||||||
NVIC_EnableIRQ(ComBlk_IRQn);
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void MSS_COMBLK_send_cmd_with_ptr
|
|
||||||
(
|
|
||||||
uint8_t cmd_opcode,
|
|
||||||
uint32_t cmd_params_ptr,
|
|
||||||
uint8_t * p_response,
|
|
||||||
uint16_t response_size,
|
|
||||||
comblk_completion_handler_t completion_handler
|
|
||||||
)
|
|
||||||
{
|
|
||||||
uint32_t tx_okay;
|
|
||||||
|
|
||||||
/*--------------------------------------------------------------------------
|
|
||||||
* Disable and clear previous interrupts.
|
|
||||||
*/
|
|
||||||
NVIC_DisableIRQ(ComBlk_IRQn);
|
|
||||||
COMBLK->INT_ENABLE = 0u;
|
|
||||||
NVIC_ClearPendingIRQ(ComBlk_IRQn);
|
|
||||||
|
|
||||||
/*--------------------------------------------------------------------------
|
|
||||||
* Abort current command if any.
|
|
||||||
*/
|
|
||||||
abort_current_cmd();
|
|
||||||
|
|
||||||
/*--------------------------------------------------------------------------
|
|
||||||
* Initialize COMBLK driver state variables.
|
|
||||||
*/
|
|
||||||
g_request_in_progress = 1u;
|
|
||||||
g_comblk_cmd_opcode = cmd_opcode;
|
|
||||||
g_comblk_p_cmd = 0u;
|
|
||||||
g_comblk_cmd_size = 0u;
|
|
||||||
g_comblk_p_data = 0u;
|
|
||||||
g_comblk_data_size = 0u;
|
|
||||||
g_comblk_p_response = p_response;
|
|
||||||
g_comblk_response_size = response_size;
|
|
||||||
g_comblk_response_idx = 0u;
|
|
||||||
g_comblk_page_handler = 0u;
|
|
||||||
g_comblk_completion_handler = completion_handler;
|
|
||||||
|
|
||||||
/*--------------------------------------------------------------------------
|
|
||||||
* Send command opcode as a single byte write to the Tx FIFO.
|
|
||||||
*/
|
|
||||||
send_cmd_opcode(g_comblk_cmd_opcode);
|
|
||||||
|
|
||||||
/*--------------------------------------------------------------------------
|
|
||||||
* Send the command parameters pointer to the Tx FIFO as a single 4 bytes
|
|
||||||
* write to the Tx FIFO.
|
|
||||||
*/
|
|
||||||
COMBLK->CONTROL |= CR_SIZETX_MASK;
|
|
||||||
|
|
||||||
/* Wait for space to become available in Tx FIFO. */
|
|
||||||
do {
|
|
||||||
tx_okay = COMBLK->STATUS & TXTOKAY_MASK;
|
|
||||||
} while(0u == tx_okay);
|
|
||||||
|
|
||||||
/* Send command opcode. */
|
|
||||||
COMBLK->DATA32 = cmd_params_ptr;
|
|
||||||
|
|
||||||
COMBLK->CONTROL &= ~CR_SIZETX_MASK;
|
|
||||||
|
|
||||||
g_comblk_state = COMBLK_WAIT_RESPONSE;
|
|
||||||
|
|
||||||
/*--------------------------------------------------------------------------
|
|
||||||
* Enable interrupt.
|
|
||||||
*/
|
|
||||||
COMBLK->INT_ENABLE |= RCVOKAY_MASK;
|
|
||||||
NVIC_EnableIRQ(ComBlk_IRQn);
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void MSS_COMBLK_send_cmd
|
|
||||||
(
|
|
||||||
const uint8_t * p_cmd,
|
|
||||||
uint16_t cmd_size,
|
|
||||||
const uint8_t * p_data,
|
|
||||||
uint32_t data_size,
|
|
||||||
uint8_t * p_response,
|
|
||||||
uint16_t response_size,
|
|
||||||
comblk_completion_handler_t completion_handler
|
|
||||||
)
|
|
||||||
{
|
|
||||||
uint32_t size_sent;
|
|
||||||
|
|
||||||
ASSERT(cmd_size > 0);
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Disable and clear previous interrupts.
|
|
||||||
*/
|
|
||||||
NVIC_DisableIRQ(ComBlk_IRQn);
|
|
||||||
COMBLK->INT_ENABLE = 0u;
|
|
||||||
NVIC_ClearPendingIRQ(ComBlk_IRQn);
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Abort current command if any.
|
|
||||||
*/
|
|
||||||
abort_current_cmd();
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Initialize COMBLK driver state variables:
|
|
||||||
*/
|
|
||||||
g_request_in_progress = 1u;
|
|
||||||
g_comblk_cmd_opcode = p_cmd[0];
|
|
||||||
g_comblk_p_cmd = p_cmd;
|
|
||||||
g_comblk_cmd_size = cmd_size;
|
|
||||||
g_comblk_p_data = p_data;
|
|
||||||
g_comblk_data_size = data_size;
|
|
||||||
g_comblk_p_response = p_response;
|
|
||||||
g_comblk_response_size = response_size;
|
|
||||||
g_comblk_response_idx = 0u;
|
|
||||||
g_comblk_page_handler = 0u;
|
|
||||||
g_comblk_completion_handler = completion_handler;
|
|
||||||
|
|
||||||
COMBLK->INT_ENABLE |= RCVOKAY_MASK;
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Fill FIFO with command.
|
|
||||||
*/
|
|
||||||
send_cmd_opcode(g_comblk_cmd_opcode);
|
|
||||||
size_sent = fill_tx_fifo(&p_cmd[1], cmd_size - 1u);
|
|
||||||
++size_sent; /* Adjust for opcode byte sent. */
|
|
||||||
if(size_sent < cmd_size)
|
|
||||||
{
|
|
||||||
g_comblk_cmd_size = g_comblk_cmd_size - (uint16_t)size_sent;
|
|
||||||
g_comblk_p_cmd = &g_comblk_p_cmd[size_sent];
|
|
||||||
|
|
||||||
g_comblk_state = COMBLK_TX_CMD;
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
g_comblk_cmd_size = 0u;
|
|
||||||
if(g_comblk_data_size > 0u)
|
|
||||||
{
|
|
||||||
g_comblk_state = COMBLK_TX_DATA;
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
g_comblk_state = COMBLK_WAIT_RESPONSE;
|
|
||||||
}
|
|
||||||
}
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Enable interrupt.
|
|
||||||
*/
|
|
||||||
NVIC_EnableIRQ(ComBlk_IRQn);
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void MSS_COMBLK_send_paged_cmd
|
|
||||||
(
|
|
||||||
const uint8_t * p_cmd,
|
|
||||||
uint16_t cmd_size,
|
|
||||||
uint8_t * p_response,
|
|
||||||
uint16_t response_size,
|
|
||||||
comblk_page_handler_t page_read_handler,
|
|
||||||
comblk_completion_handler_t completion_handler
|
|
||||||
)
|
|
||||||
{
|
|
||||||
uint32_t size_sent;
|
|
||||||
uint8_t irq_enable = 0u;
|
|
||||||
|
|
||||||
ASSERT(cmd_size > 0u);
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Disable and clear previous interrupts.
|
|
||||||
*/
|
|
||||||
NVIC_DisableIRQ(ComBlk_IRQn);
|
|
||||||
COMBLK->INT_ENABLE = 0u;
|
|
||||||
NVIC_ClearPendingIRQ(ComBlk_IRQn);
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Abort current command if any.
|
|
||||||
*/
|
|
||||||
abort_current_cmd();
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Initialize COMBLK driver state variables:
|
|
||||||
*/
|
|
||||||
g_request_in_progress = 1u;
|
|
||||||
g_comblk_cmd_opcode = p_cmd[0];
|
|
||||||
g_comblk_p_cmd = p_cmd;
|
|
||||||
g_comblk_cmd_size = cmd_size;
|
|
||||||
g_comblk_p_data = 0;
|
|
||||||
g_comblk_data_size = 0u;
|
|
||||||
g_comblk_p_response = p_response;
|
|
||||||
g_comblk_response_size = response_size;
|
|
||||||
g_comblk_response_idx = 0u;
|
|
||||||
g_comblk_page_handler = page_read_handler;
|
|
||||||
g_comblk_completion_handler = completion_handler;
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Fill FIFO with command.
|
|
||||||
*/
|
|
||||||
send_cmd_opcode(g_comblk_cmd_opcode);
|
|
||||||
size_sent = fill_tx_fifo(&p_cmd[1], cmd_size - 1u);
|
|
||||||
++size_sent; /* Adjust for opcode byte sent. */
|
|
||||||
if(size_sent < cmd_size)
|
|
||||||
{
|
|
||||||
g_comblk_cmd_size = g_comblk_cmd_size - (uint16_t)size_sent;
|
|
||||||
g_comblk_p_cmd = &g_comblk_p_cmd[size_sent];
|
|
||||||
|
|
||||||
g_comblk_state = COMBLK_TX_CMD;
|
|
||||||
irq_enable = TXTOKAY_MASK | RCVOKAY_MASK;
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
g_comblk_cmd_size = 0u;
|
|
||||||
g_comblk_state = COMBLK_TX_PAGED_DATA;
|
|
||||||
irq_enable = TXTOKAY_MASK | RCVOKAY_MASK;
|
|
||||||
}
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Enable interrupt.
|
|
||||||
*/
|
|
||||||
COMBLK->INT_ENABLE |= irq_enable;
|
|
||||||
NVIC_EnableIRQ(ComBlk_IRQn);
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
* COMBLK interrupt handler.
|
|
||||||
*/
|
|
||||||
void ComBlk_IRQHandler(void)
|
|
||||||
{
|
|
||||||
uint8_t status;
|
|
||||||
uint8_t tx_okay;
|
|
||||||
uint8_t rcv_okay;
|
|
||||||
|
|
||||||
status = (uint8_t)COMBLK->STATUS;
|
|
||||||
|
|
||||||
/* Mask off interrupt that are not enabled.*/
|
|
||||||
status &= COMBLK->INT_ENABLE;
|
|
||||||
|
|
||||||
rcv_okay = status & RCVOKAY_MASK;
|
|
||||||
|
|
||||||
if(rcv_okay)
|
|
||||||
{
|
|
||||||
handle_rx_okay_irq();
|
|
||||||
}
|
|
||||||
|
|
||||||
tx_okay = status & TXTOKAY_MASK;
|
|
||||||
if(tx_okay)
|
|
||||||
{
|
|
||||||
handle_tx_okay_irq();
|
|
||||||
}
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
static void handle_tx_okay_irq(void)
|
|
||||||
{
|
|
||||||
switch(g_comblk_state)
|
|
||||||
{
|
|
||||||
/*----------------------------------------------------------------------
|
|
||||||
* The TX_OKAY interrupt should only be enabled for states COMBLK_TX_CMD
|
|
||||||
* and COMBLK_TX_DATA.
|
|
||||||
*/
|
|
||||||
case COMBLK_TX_CMD:
|
|
||||||
if(g_comblk_cmd_size > 0u)
|
|
||||||
{
|
|
||||||
uint32_t size_sent;
|
|
||||||
size_sent = fill_tx_fifo(g_comblk_p_cmd, g_comblk_cmd_size);
|
|
||||||
if(size_sent < g_comblk_cmd_size)
|
|
||||||
{
|
|
||||||
g_comblk_cmd_size = g_comblk_cmd_size - (uint16_t)size_sent;
|
|
||||||
g_comblk_p_cmd = &g_comblk_p_cmd[size_sent];
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
g_comblk_cmd_size = 0u;
|
|
||||||
if(g_comblk_data_size > 0u)
|
|
||||||
{
|
|
||||||
g_comblk_state = COMBLK_TX_DATA;
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
g_comblk_state = COMBLK_WAIT_RESPONSE;
|
|
||||||
}
|
|
||||||
}
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
/*
|
|
||||||
* This is an invalid situation indicating a bug in the driver
|
|
||||||
* or corrupted memory.
|
|
||||||
*/
|
|
||||||
ASSERT(0);
|
|
||||||
abort_current_cmd();
|
|
||||||
}
|
|
||||||
break;
|
|
||||||
|
|
||||||
case COMBLK_TX_DATA:
|
|
||||||
if(g_comblk_data_size > 0u)
|
|
||||||
{
|
|
||||||
uint32_t size_sent;
|
|
||||||
size_sent = fill_tx_fifo(g_comblk_p_data, g_comblk_data_size);
|
|
||||||
if(size_sent < g_comblk_data_size)
|
|
||||||
{
|
|
||||||
g_comblk_data_size = g_comblk_data_size - size_sent;
|
|
||||||
g_comblk_p_data = &g_comblk_p_data[size_sent];
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
COMBLK->INT_ENABLE &= ~TXTOKAY_MASK;
|
|
||||||
g_comblk_state = COMBLK_WAIT_RESPONSE;
|
|
||||||
}
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
/*
|
|
||||||
* This is an invalid situation indicating a bug in the driver
|
|
||||||
* or corrupted memory.
|
|
||||||
*/
|
|
||||||
ASSERT(0);
|
|
||||||
abort_current_cmd();
|
|
||||||
}
|
|
||||||
break;
|
|
||||||
|
|
||||||
case COMBLK_TX_PAGED_DATA:
|
|
||||||
/*
|
|
||||||
* Read a page of data if required.
|
|
||||||
*/
|
|
||||||
if(0u == g_comblk_data_size)
|
|
||||||
{
|
|
||||||
if(g_comblk_page_handler != 0)
|
|
||||||
{
|
|
||||||
g_comblk_data_size = g_comblk_page_handler(&g_comblk_p_data);
|
|
||||||
if(0u == g_comblk_data_size)
|
|
||||||
{
|
|
||||||
COMBLK->INT_ENABLE &= ~TXTOKAY_MASK;
|
|
||||||
g_comblk_state = COMBLK_WAIT_RESPONSE;
|
|
||||||
}
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
ASSERT(0);
|
|
||||||
abort_current_cmd();
|
|
||||||
}
|
|
||||||
}
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Transmit the page data or move to COMBLK_WAIT_RESPONSE state if
|
|
||||||
* no further page data could be obtained by the call to the page
|
|
||||||
* handler above.
|
|
||||||
*/
|
|
||||||
if(0u == g_comblk_data_size)
|
|
||||||
{
|
|
||||||
COMBLK->INT_ENABLE &= ~TXTOKAY_MASK;
|
|
||||||
g_comblk_state = COMBLK_WAIT_RESPONSE;
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
uint32_t size_sent;
|
|
||||||
size_sent = fill_tx_fifo(g_comblk_p_data, g_comblk_data_size);
|
|
||||||
g_comblk_data_size = g_comblk_data_size - size_sent;
|
|
||||||
g_comblk_p_data = &g_comblk_p_data[size_sent];
|
|
||||||
}
|
|
||||||
break;
|
|
||||||
|
|
||||||
/*----------------------------------------------------------------------
|
|
||||||
* The TX_OKAY interrupt should NOT be enabled for states COMBLK_IDLE,
|
|
||||||
* COMBLK_WAIT_RESPONSE and COMBLK_RX_RESPONSE.
|
|
||||||
*/
|
|
||||||
case COMBLK_IDLE:
|
|
||||||
/* Fall through */
|
|
||||||
case COMBLK_WAIT_RESPONSE:
|
|
||||||
/* Fall through */
|
|
||||||
case COMBLK_RX_RESPONSE:
|
|
||||||
/* Fall through */
|
|
||||||
default:
|
|
||||||
COMBLK->INT_ENABLE &= ~TXTOKAY_MASK;
|
|
||||||
complete_request(0u);
|
|
||||||
g_comblk_state = COMBLK_IDLE;
|
|
||||||
break;
|
|
||||||
}
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
static void handle_rx_okay_irq(void)
|
|
||||||
{
|
|
||||||
uint16_t data16;
|
|
||||||
uint16_t is_command;
|
|
||||||
uint8_t data8;
|
|
||||||
|
|
||||||
data16 = (uint16_t)COMBLK->DATA8;
|
|
||||||
is_command = data16 & DATA8_COMMAND_MASK;
|
|
||||||
data8 = (uint8_t)data16;
|
|
||||||
|
|
||||||
switch(g_comblk_state)
|
|
||||||
{
|
|
||||||
/*----------------------------------------------------------------------
|
|
||||||
* MSS_COMBLK_init() enables the RCV_OKAY interrupt for the COMBLK_IDLE
|
|
||||||
* state to receive the asynchronous power-on-reset from the system
|
|
||||||
* controller.
|
|
||||||
*/
|
|
||||||
case COMBLK_IDLE:
|
|
||||||
if(is_command)
|
|
||||||
{
|
|
||||||
if(data8 != POR_DIGEST_ERROR_OPCODE)
|
|
||||||
{
|
|
||||||
uint8_t rxed_opcode;
|
|
||||||
rxed_opcode = data8;
|
|
||||||
process_sys_ctrl_command(rxed_opcode);
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
g_comblk_response_idx = 0;
|
|
||||||
g_comblk_p_response[g_comblk_response_idx] = data8;
|
|
||||||
g_comblk_response_idx++;
|
|
||||||
g_comblk_p_response[g_comblk_response_idx] = 0x00u;
|
|
||||||
g_comblk_state = COMBLK_RX_RESPONSE;
|
|
||||||
}
|
|
||||||
}
|
|
||||||
break;
|
|
||||||
|
|
||||||
/*----------------------------------------------------------------------
|
|
||||||
* The RCV_OKAY interrupt should only be enabled for states
|
|
||||||
* COMBLK_WAIT_RESPONSE and COMBLK_RX_RESPONSE.
|
|
||||||
*/
|
|
||||||
case COMBLK_WAIT_RESPONSE:
|
|
||||||
if(is_command)
|
|
||||||
{
|
|
||||||
uint8_t rxed_opcode;
|
|
||||||
rxed_opcode = data8;
|
|
||||||
if(rxed_opcode == g_comblk_cmd_opcode)
|
|
||||||
{
|
|
||||||
g_comblk_response_idx = 0u;
|
|
||||||
g_comblk_p_response[g_comblk_response_idx] = rxed_opcode;
|
|
||||||
++g_comblk_response_idx;
|
|
||||||
g_comblk_state = COMBLK_RX_RESPONSE;
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
process_sys_ctrl_command(rxed_opcode);
|
|
||||||
}
|
|
||||||
}
|
|
||||||
break;
|
|
||||||
|
|
||||||
case COMBLK_RX_RESPONSE:
|
|
||||||
if(is_command)
|
|
||||||
{
|
|
||||||
uint8_t rxed_opcode;
|
|
||||||
rxed_opcode = data8;
|
|
||||||
process_sys_ctrl_command(rxed_opcode);
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
if( g_comblk_p_response[g_comblk_response_idx-1] == POR_DIGEST_ERROR_OPCODE)
|
|
||||||
{
|
|
||||||
g_comblk_p_response[g_comblk_response_idx] = data8;
|
|
||||||
process_sys_ctrl_command(g_comblk_p_response[g_comblk_response_idx-1]);
|
|
||||||
g_comblk_state = COMBLK_IDLE;
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
if(g_comblk_response_idx < g_comblk_response_size)
|
|
||||||
{
|
|
||||||
uint8_t rxed_data;
|
|
||||||
|
|
||||||
rxed_data = data8;
|
|
||||||
g_comblk_p_response[g_comblk_response_idx] = rxed_data;
|
|
||||||
++g_comblk_response_idx;
|
|
||||||
}
|
|
||||||
|
|
||||||
if(g_comblk_response_idx == g_comblk_response_size)
|
|
||||||
{
|
|
||||||
complete_request(g_comblk_response_idx);
|
|
||||||
g_comblk_state = COMBLK_IDLE;
|
|
||||||
}
|
|
||||||
}
|
|
||||||
}
|
|
||||||
break;
|
|
||||||
|
|
||||||
/*----------------------------------------------------------------------
|
|
||||||
* The RCV_OKAY interrupt should NOT be enabled for states
|
|
||||||
* COMBLK_IDLE, COMBLK_TX_CMD and COMBLK_TX_DATA.
|
|
||||||
*/
|
|
||||||
case COMBLK_TX_PAGED_DATA:
|
|
||||||
/* This is needed because when there is an error, we need to terminate loading the data */
|
|
||||||
if(!is_command)
|
|
||||||
{
|
|
||||||
g_comblk_p_response[1] = data8;
|
|
||||||
complete_request(2u);
|
|
||||||
g_comblk_state = COMBLK_IDLE;
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
uint8_t rxed_opcode;
|
|
||||||
rxed_opcode = data8;
|
|
||||||
process_sys_ctrl_command(rxed_opcode);
|
|
||||||
}
|
|
||||||
break;
|
|
||||||
|
|
||||||
case COMBLK_TX_CMD:
|
|
||||||
/* Fall through */
|
|
||||||
case COMBLK_TX_DATA:
|
|
||||||
/* Fall through */
|
|
||||||
if(is_command)
|
|
||||||
{
|
|
||||||
uint8_t rxed_opcode;
|
|
||||||
rxed_opcode = data8;
|
|
||||||
process_sys_ctrl_command(rxed_opcode);
|
|
||||||
}
|
|
||||||
break;
|
|
||||||
|
|
||||||
default:
|
|
||||||
complete_request(0u);
|
|
||||||
g_comblk_state = COMBLK_IDLE;
|
|
||||||
break;
|
|
||||||
}
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
static void complete_request
|
|
||||||
(
|
|
||||||
uint16_t response_length
|
|
||||||
)
|
|
||||||
{
|
|
||||||
if(g_comblk_completion_handler != 0)
|
|
||||||
{
|
|
||||||
g_comblk_completion_handler(g_comblk_p_response, response_length);
|
|
||||||
g_comblk_completion_handler = 0;
|
|
||||||
g_request_in_progress = 0u;
|
|
||||||
}
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
static void abort_current_cmd(void)
|
|
||||||
{
|
|
||||||
if(g_request_in_progress)
|
|
||||||
{
|
|
||||||
uint32_t flush_in_progress;
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Call completion handler just in case we are in a multi threaded system
|
|
||||||
* to avoid a task lockup.
|
|
||||||
*/
|
|
||||||
complete_request(g_comblk_response_idx);
|
|
||||||
|
|
||||||
/*
|
|
||||||
* Flush the FIFOs
|
|
||||||
*/
|
|
||||||
COMBLK->CONTROL |= CR_FLUSHOUT_MASK;
|
|
||||||
do {
|
|
||||||
flush_in_progress = COMBLK->CONTROL & CR_FLUSHOUT_MASK;
|
|
||||||
} while(flush_in_progress);
|
|
||||||
}
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
static void send_cmd_opcode
|
|
||||||
(
|
|
||||||
uint8_t opcode
|
|
||||||
)
|
|
||||||
{
|
|
||||||
uint32_t tx_okay;
|
|
||||||
|
|
||||||
/* Set transmit FIFO to transfer bytes. */
|
|
||||||
COMBLK->CONTROL &= ~CR_SIZETX_MASK;
|
|
||||||
|
|
||||||
/* Wait for space to become available in Tx FIFO. */
|
|
||||||
do {
|
|
||||||
tx_okay = COMBLK->STATUS & TXTOKAY_MASK;
|
|
||||||
} while(0u == tx_okay);
|
|
||||||
|
|
||||||
/* Send command opcode. */
|
|
||||||
COMBLK->FRAME_START8 = opcode;
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
static uint32_t fill_tx_fifo
|
|
||||||
(
|
|
||||||
const uint8_t * p_cmd,
|
|
||||||
uint32_t cmd_size
|
|
||||||
)
|
|
||||||
{
|
|
||||||
volatile uint32_t tx_okay;
|
|
||||||
uint32_t size_sent;
|
|
||||||
|
|
||||||
/* Set transmit FIFO to transfer bytes. */
|
|
||||||
COMBLK->CONTROL &= ~CR_SIZETX_MASK;
|
|
||||||
|
|
||||||
size_sent = 0u;
|
|
||||||
tx_okay = COMBLK->STATUS & TXTOKAY_MASK;
|
|
||||||
while((tx_okay != 0u) && (size_sent < cmd_size))
|
|
||||||
{
|
|
||||||
COMBLK->DATA8 = p_cmd[size_sent];
|
|
||||||
++size_sent;
|
|
||||||
tx_okay = COMBLK->STATUS & TXTOKAY_MASK;
|
|
||||||
}
|
|
||||||
|
|
||||||
return size_sent;
|
|
||||||
}
|
|
||||||
|
|
||||||
/*==============================================================================
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
static void process_sys_ctrl_command(uint8_t cmd_opcode)
|
|
||||||
{
|
|
||||||
if(g_async_event_handler != 0)
|
|
||||||
{
|
|
||||||
g_async_event_handler(cmd_opcode);
|
|
||||||
}
|
|
||||||
}
|
|
||||||
|
|
||||||
|
|
@ -1,90 +0,0 @@
|
||||||
/*******************************************************************************
|
|
||||||
* (c) Copyright 2012-2016 Microsemi SoC Products Group. All rights reserved.
|
|
||||||
*
|
|
||||||
* SmartFusion2 COMBLK access functions.
|
|
||||||
*
|
|
||||||
* SVN $Revision: 8345 $
|
|
||||||
* SVN $Date: 2016-03-23 11:53:04 +0530 (Wed, 23 Mar 2016) $
|
|
||||||
*/
|
|
||||||
#ifndef __MSS_COMBLK_H_
|
|
||||||
#define __MSS_COMBLK_H_ 1
|
|
||||||
|
|
||||||
#include "../../CMSIS/m2sxxx.h"
|
|
||||||
#include "mss_comblk_page_handler.h"
|
|
||||||
|
|
||||||
#ifdef __cplusplus
|
|
||||||
extern "C" {
|
|
||||||
#endif
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
typedef void(*comblk_completion_handler_t)(uint8_t * p_response, uint16_t response_size);
|
|
||||||
|
|
||||||
typedef void (*comblk_async_event_handler_t)(uint8_t event_opcode);
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void MSS_COMBLK_init
|
|
||||||
(
|
|
||||||
comblk_async_event_handler_t async_event_handler,
|
|
||||||
uint8_t* p_response
|
|
||||||
);
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void MSS_COMBLK_send_cmd_with_ptr
|
|
||||||
(
|
|
||||||
uint8_t cmd_opcode,
|
|
||||||
uint32_t cmd_params_ptr,
|
|
||||||
uint8_t * p_response,
|
|
||||||
uint16_t response_size,
|
|
||||||
comblk_completion_handler_t completion_handler
|
|
||||||
);
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void MSS_COMBLK_send_cmd
|
|
||||||
(
|
|
||||||
const uint8_t * p_cmd,
|
|
||||||
uint16_t cmd_size,
|
|
||||||
const uint8_t * p_data,
|
|
||||||
uint32_t data_size,
|
|
||||||
uint8_t * p_response,
|
|
||||||
uint16_t response_size,
|
|
||||||
comblk_completion_handler_t completion_handler
|
|
||||||
);
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void MSS_COMBLK_read
|
|
||||||
(
|
|
||||||
const uint8_t * p_data,
|
|
||||||
uint16_t cmd_size,
|
|
||||||
uint8_t * p_response,
|
|
||||||
uint16_t response_size,
|
|
||||||
comblk_completion_handler_t completion_handler
|
|
||||||
);
|
|
||||||
|
|
||||||
/*------------------------------------------------------------------------------
|
|
||||||
*
|
|
||||||
*/
|
|
||||||
void MSS_COMBLK_send_paged_cmd
|
|
||||||
(
|
|
||||||
const uint8_t * p_cmd,
|
|
||||||
uint16_t cmd_size,
|
|
||||||
uint8_t * p_response,
|
|
||||||
uint16_t response_size,
|
|
||||||
comblk_page_handler_t page_read_handler,
|
|
||||||
comblk_completion_handler_t completion_handler
|
|
||||||
);
|
|
||||||
|
|
||||||
#ifdef __cplusplus
|
|
||||||
}
|
|
||||||
#endif
|
|
||||||
|
|
||||||
#endif /* __MSS_COMBLK_H_ */
|
|
||||||
|
|
@ -1,66 +0,0 @@
|
||||||
/*******************************************************************************
|
|
||||||
* (c) Copyright 2012-2016 Microsemi SoC Products Group. All rights reserved.
|
|
||||||
*
|
|
||||||
* SmartFusion2 MSS COM block driver, page handler callback function prototype.
|
|
||||||
*
|
|
||||||
* SVN $Revision: 8345 $
|
|
||||||
* SVN $Date: 2016-03-23 11:53:04 +0530 (Wed, 23 Mar 2016) $
|
|
||||||
*/
|
|
||||||
|
|
||||||
#ifndef __MSS_COMBLK_PAGE_HANDLER_H_
|
|
||||||
#define __MSS_COMBLK_PAGE_HANDLER_H_ 1
|
|
||||||
|
|
||||||
#ifdef __cplusplus
|
|
||||||
extern "C" {
|
|
||||||
#endif
|
|
||||||
|
|
||||||
/*-------------------------------------------------------------------------*//**
|
|
||||||
The comblk_page_handler_t typedef specifies the function prototype of a COMBLK
|
|
||||||
page handler callback function. This callback is used by the system services
|
|
||||||
and COMBLK drivers as part of in-system programming (ISP) to retrieve the next
|
|
||||||
page of programming information to send to the SmartFusion2 System Controller
|
|
||||||
via the COMBLK.
|
|
||||||
The COMBLK page handler must be implemented by the application layer to return
|
|
||||||
the address of the next page of programming data to be sent to the
|
|
||||||
SmartFusion2 system controller. It must return the number of bytes contained
|
|
||||||
in the next page. Returning a value of zero indicates that all programming
|
|
||||||
data has been passed to the system services/COMBLK drivers.
|
|
||||||
|
|
||||||
@code
|
|
||||||
#define PAGE_LENGTH 512
|
|
||||||
|
|
||||||
uint8_t programming_data[PROG_DATA_LENGTH];
|
|
||||||
uint32_t prog_data_index = 0;
|
|
||||||
|
|
||||||
uint32_t page_read_handler
|
|
||||||
(
|
|
||||||
uint8_t const ** pp_next_page
|
|
||||||
)
|
|
||||||
{
|
|
||||||
uint32_t returned_page_length;
|
|
||||||
uint32_t remaining_length;
|
|
||||||
|
|
||||||
*pp_next_page = &programming_data[prog_data_index];
|
|
||||||
remaining_length = PROG_DATA_LENGTH - prog_data_index
|
|
||||||
if(remaining_length > PAGE_LENGTH)
|
|
||||||
{
|
|
||||||
returned_page_length = PAGE_LENGTH;
|
|
||||||
}
|
|
||||||
else
|
|
||||||
{
|
|
||||||
returned_page_length = remaining_length;
|
|
||||||
prog_data_index = PROG_DATA_LENGTH;
|
|
||||||
}
|
|
||||||
|
|
||||||
return returned_page_length;
|
|
||||||
}
|
|
||||||
|
|
||||||
@endcode
|
|
||||||
*/
|
|
||||||
typedef uint32_t (*comblk_page_handler_t)(uint8_t const ** pp_next_page);
|
|
||||||
|
|
||||||
#ifdef __cplusplus
|
|
||||||
}
|
|
||||||
#endif
|
|
||||||
|
|
||||||
#endif /* __MSS_COMBLK_PAGE_HANDLER_H_ */
|
|
||||||
|
|
@ -1,16 +0,0 @@
|
||||||
; *************************************************************
|
|
||||||
; *** Scatter-Loading Description File generated by uVision ***
|
|
||||||
; *************************************************************
|
|
||||||
|
|
||||||
LR_IROM1 0x00000000 0x00040000 { ; load region size_region
|
|
||||||
ER_IROM1 0x00000000 0x00040000 { ; load address = execution address
|
|
||||||
*.o (RESET, +First)
|
|
||||||
*(InRoot$$Sections)
|
|
||||||
.ANY (+RO)
|
|
||||||
.ANY (+XO)
|
|
||||||
}
|
|
||||||
RW_IRAM1 0x20000000 0x00010000 { ; RW data
|
|
||||||
.ANY (+RW +ZI)
|
|
||||||
}
|
|
||||||
}
|
|
||||||
|
|
||||||
|
|
@ -48,14 +48,14 @@
|
||||||
<NotGenerated>0</NotGenerated>
|
<NotGenerated>0</NotGenerated>
|
||||||
<InvalidFlash>1</InvalidFlash>
|
<InvalidFlash>1</InvalidFlash>
|
||||||
</TargetStatus>
|
</TargetStatus>
|
||||||
<OutputDirectory>..\OBJ\</OutputDirectory>
|
<OutputDirectory>.\obj\</OutputDirectory>
|
||||||
<OutputName>project</OutputName>
|
<OutputName>project</OutputName>
|
||||||
<CreateExecutable>1</CreateExecutable>
|
<CreateExecutable>1</CreateExecutable>
|
||||||
<CreateLib>0</CreateLib>
|
<CreateLib>0</CreateLib>
|
||||||
<CreateHexFile>1</CreateHexFile>
|
<CreateHexFile>1</CreateHexFile>
|
||||||
<DebugInformation>1</DebugInformation>
|
<DebugInformation>1</DebugInformation>
|
||||||
<BrowseInformation>1</BrowseInformation>
|
<BrowseInformation>1</BrowseInformation>
|
||||||
<ListingPath>..\OBJ\</ListingPath>
|
<ListingPath>.\obj\</ListingPath>
|
||||||
<HexFormatSelection>1</HexFormatSelection>
|
<HexFormatSelection>1</HexFormatSelection>
|
||||||
<Merge32K>0</Merge32K>
|
<Merge32K>0</Merge32K>
|
||||||
<CreateBatchFile>0</CreateBatchFile>
|
<CreateBatchFile>0</CreateBatchFile>
|
||||||
|
|
@ -83,7 +83,7 @@
|
||||||
<RunUserProg1>1</RunUserProg1>
|
<RunUserProg1>1</RunUserProg1>
|
||||||
<RunUserProg2>0</RunUserProg2>
|
<RunUserProg2>0</RunUserProg2>
|
||||||
<UserProg1Name>fromelf --bin -o "$L@L.bin" "#L"</UserProg1Name>
|
<UserProg1Name>fromelf --bin -o "$L@L.bin" "#L"</UserProg1Name>
|
||||||
<UserProg2Name>..\BAT\del_hex_line1.bat</UserProg2Name>
|
<UserProg2Name></UserProg2Name>
|
||||||
<UserProg1Dos16Mode>0</UserProg1Dos16Mode>
|
<UserProg1Dos16Mode>0</UserProg1Dos16Mode>
|
||||||
<UserProg2Dos16Mode>0</UserProg2Dos16Mode>
|
<UserProg2Dos16Mode>0</UserProg2Dos16Mode>
|
||||||
<nStopA1X>0</nStopA1X>
|
<nStopA1X>0</nStopA1X>
|
||||||
|
|
@ -327,8 +327,8 @@
|
||||||
<uC99>0</uC99>
|
<uC99>0</uC99>
|
||||||
<uGnu>0</uGnu>
|
<uGnu>0</uGnu>
|
||||||
<useXO>0</useXO>
|
<useXO>0</useXO>
|
||||||
<v6Lang>0</v6Lang>
|
<v6Lang>3</v6Lang>
|
||||||
<v6LangP>0</v6LangP>
|
<v6LangP>3</v6LangP>
|
||||||
<vShortEn>0</vShortEn>
|
<vShortEn>0</vShortEn>
|
||||||
<vShortWch>0</vShortWch>
|
<vShortWch>0</vShortWch>
|
||||||
<v6Lto>0</v6Lto>
|
<v6Lto>0</v6Lto>
|
||||||
|
|
@ -338,7 +338,7 @@
|
||||||
<MiscControls></MiscControls>
|
<MiscControls></MiscControls>
|
||||||
<Define></Define>
|
<Define></Define>
|
||||||
<Undefine></Undefine>
|
<Undefine></Undefine>
|
||||||
<IncludePath>..\user;..\CMSIS;..\CMSIS\startup_arm;..\hal;..\hal\CortexM3;..\hal\CortexM3\Keil;..\libraries\mss_gpio;..\libraries\sys_config;..\libraries\mss_uart;..\..\..\include;..\..\..\include\libc;..\..\..\components\finsh</IncludePath>
|
<IncludePath>..\smartfusion2;.\board;.\drivers;.\CMSIS;.\CMSIS\startup_arm;.\libraries\mss_gpio;.\libraries\mss_uart;.\libraries\sys_config;..\..\include;..\..\include\libc;..\..\components\finsh;..\..\components\drivers\include;..\..\components\drivers\include\drivers;..\..\components\drivers\include\ipc</IncludePath>
|
||||||
</VariousControls>
|
</VariousControls>
|
||||||
</Cads>
|
</Cads>
|
||||||
<Aads>
|
<Aads>
|
||||||
|
|
@ -369,7 +369,7 @@
|
||||||
<TextAddressRange>0x00000000</TextAddressRange>
|
<TextAddressRange>0x00000000</TextAddressRange>
|
||||||
<DataAddressRange>0x20000000</DataAddressRange>
|
<DataAddressRange>0x20000000</DataAddressRange>
|
||||||
<pXoBase></pXoBase>
|
<pXoBase></pXoBase>
|
||||||
<ScatterFile></ScatterFile>
|
<ScatterFile>..\OBJ\project.sct</ScatterFile>
|
||||||
<IncludeLibs></IncludeLibs>
|
<IncludeLibs></IncludeLibs>
|
||||||
<IncludeLibsPath></IncludeLibsPath>
|
<IncludeLibsPath></IncludeLibsPath>
|
||||||
<Misc></Misc>
|
<Misc></Misc>
|
||||||
|
|
@ -380,27 +380,22 @@
|
||||||
</TargetOption>
|
</TargetOption>
|
||||||
<Groups>
|
<Groups>
|
||||||
<Group>
|
<Group>
|
||||||
<GroupName>user</GroupName>
|
<GroupName>Applications</GroupName>
|
||||||
<Files>
|
<Files>
|
||||||
<File>
|
<File>
|
||||||
<FileName>main.c</FileName>
|
<FileName>main.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>.\main.c</FilePath>
|
<FilePath>.\applicatons\main.c</FilePath>
|
||||||
</File>
|
|
||||||
<File>
|
|
||||||
<FileName>config.c</FileName>
|
|
||||||
<FileType>1</FileType>
|
|
||||||
<FilePath>.\config.c</FilePath>
|
|
||||||
</File>
|
|
||||||
<File>
|
|
||||||
<FileName>config.h</FileName>
|
|
||||||
<FileType>5</FileType>
|
|
||||||
<FilePath>.\config.h</FilePath>
|
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>board.c</FileName>
|
<FileName>board.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>.\board.c</FilePath>
|
<FilePath>.\board\board.c</FilePath>
|
||||||
|
</File>
|
||||||
|
<File>
|
||||||
|
<FileName>config.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>.\board\config.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>rtconfig.h</FileName>
|
<FileName>rtconfig.h</FileName>
|
||||||
|
|
@ -415,242 +410,297 @@
|
||||||
<File>
|
<File>
|
||||||
<FileName>mss_gpio.c</FileName>
|
<FileName>mss_gpio.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\libraries\mss_gpio\mss_gpio.c</FilePath>
|
<FilePath>.\libraries\mss_gpio\mss_gpio.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>mss_uart.c</FileName>
|
<FileName>mss_uart.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\libraries\mss_uart\mss_uart.c</FilePath>
|
<FilePath>.\libraries\mss_uart\mss_uart.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>sys_config.c</FileName>
|
<FileName>sys_config.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\libraries\sys_config\sys_config.c</FilePath>
|
<FilePath>.\libraries\sys_config\sys_config.c</FilePath>
|
||||||
</File>
|
|
||||||
</Files>
|
|
||||||
</Group>
|
|
||||||
<Group>
|
|
||||||
<GroupName>hal</GroupName>
|
|
||||||
<Files>
|
|
||||||
<File>
|
|
||||||
<FileName>cortex_nvic.c</FileName>
|
|
||||||
<FileType>1</FileType>
|
|
||||||
<FilePath>..\HAL\CortexM3\cortex_nvic.c</FilePath>
|
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>hw_reg_access.s</FileName>
|
<FileName>sys_config_mss_clocks.h</FileName>
|
||||||
<FileType>2</FileType>
|
<FileType>5</FileType>
|
||||||
<FilePath>..\HAL\CortexM3\Keil\hw_reg_access.s</FilePath>
|
<FilePath>.\libraries\sys_config\sys_config_mss_clocks.h</FilePath>
|
||||||
</File>
|
|
||||||
<File>
|
|
||||||
<FileName>hal.s</FileName>
|
|
||||||
<FileType>2</FileType>
|
|
||||||
<FilePath>..\HAL\CortexM3\Keil\hal.s</FilePath>
|
|
||||||
</File>
|
</File>
|
||||||
</Files>
|
</Files>
|
||||||
</Group>
|
</Group>
|
||||||
<Group>
|
<Group>
|
||||||
<GroupName>CMSIS</GroupName>
|
<GroupName>CMSIS</GroupName>
|
||||||
<Files>
|
<Files>
|
||||||
|
<File>
|
||||||
|
<FileName>core_cm3.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>.\CMSIS\core_cm3.c</FilePath>
|
||||||
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>system_m2sxxx.c</FileName>
|
<FileName>system_m2sxxx.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\CMSIS\system_m2sxxx.c</FilePath>
|
<FilePath>.\CMSIS\system_m2sxxx.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>startup_m2sxxx.s</FileName>
|
<FileName>startup_m2sxxx.s</FileName>
|
||||||
<FileType>2</FileType>
|
<FileType>2</FileType>
|
||||||
<FilePath>..\CMSIS\startup_arm\startup_m2sxxx.s</FilePath>
|
<FilePath>.\CMSIS\startup_arm\startup_m2sxxx.s</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>core_cm3.c</FileName>
|
<FileName>hw_reg_access.s</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>2</FileType>
|
||||||
<FilePath>..\CMSIS\core_cm3.c</FilePath>
|
<FilePath>.\CMSIS\hal\hw_reg_access.s</FilePath>
|
||||||
</File>
|
</File>
|
||||||
</Files>
|
</Files>
|
||||||
</Group>
|
</Group>
|
||||||
<Group>
|
<Group>
|
||||||
<GroupName>RT-Thread/Kernel</GroupName>
|
<GroupName>Kernel</GroupName>
|
||||||
<Files>
|
<Files>
|
||||||
<File>
|
<File>
|
||||||
<FileName>clock.c</FileName>
|
<FileName>clock.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\clock.c</FilePath>
|
<FilePath>..\..\src\clock.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>components.c</FileName>
|
<FileName>components.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\components.c</FilePath>
|
<FilePath>..\..\src\components.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>cpu.c</FileName>
|
<FileName>cpu.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\cpu.c</FilePath>
|
<FilePath>..\..\src\cpu.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>device.c</FileName>
|
<FileName>device.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\device.c</FilePath>
|
<FilePath>..\..\src\device.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>idle.c</FileName>
|
<FileName>idle.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\idle.c</FilePath>
|
<FilePath>..\..\src\idle.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>ipc.c</FileName>
|
<FileName>ipc.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\ipc.c</FilePath>
|
<FilePath>..\..\src\ipc.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>irq.c</FileName>
|
<FileName>irq.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\irq.c</FilePath>
|
<FilePath>..\..\src\irq.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>kservice.c</FileName>
|
<FileName>kservice.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\kservice.c</FilePath>
|
<FilePath>..\..\src\kservice.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>mem.c</FileName>
|
<FileName>mem.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\mem.c</FilePath>
|
<FilePath>..\..\src\mem.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>memheap.c</FileName>
|
<FileName>memheap.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\memheap.c</FilePath>
|
<FilePath>..\..\src\memheap.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>mempool.c</FileName>
|
<FileName>mempool.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\mempool.c</FilePath>
|
<FilePath>..\..\src\mempool.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>object.c</FileName>
|
<FileName>object.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\object.c</FilePath>
|
<FilePath>..\..\src\object.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>scheduler.c</FileName>
|
<FileName>scheduler.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\scheduler.c</FilePath>
|
<FilePath>..\..\src\scheduler.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>signal.c</FileName>
|
<FileName>signal.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\signal.c</FilePath>
|
<FilePath>..\..\src\signal.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>slab.c</FileName>
|
<FileName>slab.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\slab.c</FilePath>
|
<FilePath>..\..\src\slab.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>thread.c</FileName>
|
<FileName>thread.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\thread.c</FilePath>
|
<FilePath>..\..\src\thread.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>timer.c</FileName>
|
<FileName>timer.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\src\timer.c</FilePath>
|
<FilePath>..\..\src\timer.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
</Files>
|
</Files>
|
||||||
</Group>
|
</Group>
|
||||||
<Group>
|
<Group>
|
||||||
<GroupName>RT-Thread/Libcpu</GroupName>
|
<GroupName>Drivers</GroupName>
|
||||||
<Files>
|
<Files>
|
||||||
<File>
|
<File>
|
||||||
<FileName>cpuport.c</FileName>
|
<FileName>drv_gpio.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\libcpu\arm\cortex-m3\cpuport.c</FilePath>
|
<FilePath>.\drivers\drv_gpio.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>context_rvds.S</FileName>
|
<FileName>drv_uart.c</FileName>
|
||||||
<FileType>2</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\libcpu\arm\cortex-m3\context_rvds.S</FilePath>
|
<FilePath>.\drivers\drv_uart.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
</Files>
|
</Files>
|
||||||
</Group>
|
</Group>
|
||||||
<Group>
|
<Group>
|
||||||
<GroupName>RT-Thread/Finsh</GroupName>
|
<GroupName>DeviceDrivers</GroupName>
|
||||||
|
<Files>
|
||||||
|
<File>
|
||||||
|
<FileName>pin.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>..\..\components\drivers\misc\pin.c</FilePath>
|
||||||
|
</File>
|
||||||
|
<File>
|
||||||
|
<FileName>completion.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>..\..\components\drivers\src\completion.c</FilePath>
|
||||||
|
</File>
|
||||||
|
<File>
|
||||||
|
<FileName>dataqueue.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>..\..\components\drivers\src\dataqueue.c</FilePath>
|
||||||
|
</File>
|
||||||
|
<File>
|
||||||
|
<FileName>pipe.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>..\..\components\drivers\src\pipe.c</FilePath>
|
||||||
|
</File>
|
||||||
|
<File>
|
||||||
|
<FileName>ringblk_buf.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>..\..\components\drivers\src\ringblk_buf.c</FilePath>
|
||||||
|
</File>
|
||||||
|
<File>
|
||||||
|
<FileName>ringbuffer.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>..\..\components\drivers\src\ringbuffer.c</FilePath>
|
||||||
|
</File>
|
||||||
|
<File>
|
||||||
|
<FileName>waitqueue.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>..\..\components\drivers\src\waitqueue.c</FilePath>
|
||||||
|
</File>
|
||||||
|
<File>
|
||||||
|
<FileName>workqueue.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>..\..\components\drivers\src\workqueue.c</FilePath>
|
||||||
|
</File>
|
||||||
|
<File>
|
||||||
|
<FileName>serial.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>..\..\components\drivers\serial\serial.c</FilePath>
|
||||||
|
</File>
|
||||||
|
</Files>
|
||||||
|
</Group>
|
||||||
|
<Group>
|
||||||
|
<GroupName>finish</GroupName>
|
||||||
<Files>
|
<Files>
|
||||||
<File>
|
<File>
|
||||||
<FileName>cmd.c</FileName>
|
<FileName>cmd.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\cmd.c</FilePath>
|
<FilePath>..\..\components\finsh\cmd.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>finsh_compiler.c</FileName>
|
<FileName>finsh_compiler.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\finsh_compiler.c</FilePath>
|
<FilePath>..\..\components\finsh\finsh_compiler.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>finsh_error.c</FileName>
|
<FileName>finsh_error.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\finsh_error.c</FilePath>
|
<FilePath>..\..\components\finsh\finsh_error.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>finsh_heap.c</FileName>
|
<FileName>finsh_heap.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\finsh_heap.c</FilePath>
|
<FilePath>..\..\components\finsh\finsh_heap.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>finsh_init.c</FileName>
|
<FileName>finsh_init.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\finsh_init.c</FilePath>
|
<FilePath>..\..\components\finsh\finsh_init.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>finsh_node.c</FileName>
|
<FileName>finsh_node.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\finsh_node.c</FilePath>
|
<FilePath>..\..\components\finsh\finsh_node.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>finsh_ops.c</FileName>
|
<FileName>finsh_ops.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\finsh_ops.c</FilePath>
|
<FilePath>..\..\components\finsh\finsh_ops.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>finsh_parser.c</FileName>
|
<FileName>finsh_parser.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\finsh_parser.c</FilePath>
|
<FilePath>..\..\components\finsh\finsh_parser.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>finsh_token.c</FileName>
|
<FileName>finsh_token.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\finsh_token.c</FilePath>
|
<FilePath>..\..\components\finsh\finsh_token.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>finsh_var.c</FileName>
|
<FileName>finsh_var.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\finsh_var.c</FilePath>
|
<FilePath>..\..\components\finsh\finsh_var.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>finsh_vm.c</FileName>
|
<FileName>finsh_vm.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\finsh_vm.c</FilePath>
|
<FilePath>..\..\components\finsh\finsh_vm.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>msh.c</FileName>
|
<FileName>msh.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\msh.c</FilePath>
|
<FilePath>..\..\components\finsh\msh.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>msh_file.c</FileName>
|
<FileName>msh_file.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\msh_file.c</FilePath>
|
<FilePath>..\..\components\finsh\msh_file.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>shell.c</FileName>
|
<FileName>shell.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\shell.c</FilePath>
|
<FilePath>..\..\components\finsh\shell.c</FilePath>
|
||||||
</File>
|
</File>
|
||||||
<File>
|
<File>
|
||||||
<FileName>symbol.c</FileName>
|
<FileName>symbol.c</FileName>
|
||||||
<FileType>1</FileType>
|
<FileType>1</FileType>
|
||||||
<FilePath>..\..\..\components\finsh\symbol.c</FilePath>
|
<FilePath>..\..\components\finsh\symbol.c</FilePath>
|
||||||
|
</File>
|
||||||
|
</Files>
|
||||||
|
</Group>
|
||||||
|
<Group>
|
||||||
|
<GroupName>cpu</GroupName>
|
||||||
|
<Files>
|
||||||
|
<File>
|
||||||
|
<FileName>cpuport.c</FileName>
|
||||||
|
<FileType>1</FileType>
|
||||||
|
<FilePath>..\..\libcpu\arm\cortex-m3\cpuport.c</FilePath>
|
||||||
|
</File>
|
||||||
|
<File>
|
||||||
|
<FileName>context_rvds.S</FileName>
|
||||||
|
<FileType>2</FileType>
|
||||||
|
<FilePath>..\..\libcpu\arm\cortex-m3\context_rvds.S</FilePath>
|
||||||
</File>
|
</File>
|
||||||
</Files>
|
</Files>
|
||||||
</Group>
|
</Group>
|
||||||
|
|
@ -0,0 +1,49 @@
|
||||||
|
/* RT-Thread config file */
|
||||||
|
#ifndef __RTTHREAD_CFG_H__
|
||||||
|
#define __RTTHREAD_CFG_H__
|
||||||
|
|
||||||
|
#define RT_THREAD_PRIORITY_MAX 8
|
||||||
|
#define RT_TICK_PER_SECOND 1000
|
||||||
|
#define RT_ALIGN_SIZE 4
|
||||||
|
#define RT_NAME_MAX 8
|
||||||
|
|
||||||
|
#define RT_USING_COMPONENTS_INIT
|
||||||
|
#define RT_USING_USER_MAIN
|
||||||
|
#define RT_USING_DEVICE
|
||||||
|
#define RT_USING_PIN
|
||||||
|
#define RT_USING_SERIAL
|
||||||
|
|
||||||
|
#define RT_USING_CONSOLE
|
||||||
|
#define RT_CONSOLEBUF_SIZE 128
|
||||||
|
#define RT_CONSOLE_DEVICE_NAME "uart1"
|
||||||
|
|
||||||
|
#define BSP_USING_GPIO
|
||||||
|
#define BSP_USING_UART0
|
||||||
|
#define BSP_USING_UART1
|
||||||
|
|
||||||
|
#define RT_MAIN_THREAD_STACK_SIZE 512
|
||||||
|
#define RT_DEBUG_INIT 0
|
||||||
|
|
||||||
|
#define RT_TIMER_THREAD_PRIO 4
|
||||||
|
#define RT_TIMER_THREAD_STACK_SIZE 512
|
||||||
|
|
||||||
|
#define RT_USING_SEMAPHORE
|
||||||
|
#define RT_USING_MUTEX
|
||||||
|
#define RT_USING_EVENT
|
||||||
|
#define RT_USING_MAILBOX
|
||||||
|
#define RT_USING_MESSAGEQUEUE
|
||||||
|
#define RT_USING_HEAP
|
||||||
|
#define RT_USING_SMALL_MEM
|
||||||
|
|
||||||
|
#define RT_USING_FINSH
|
||||||
|
|
||||||
|
#define FINSH_USING_MSH
|
||||||
|
#define FINSH_USING_MSH_ONLY
|
||||||
|
#define __FINSH_THREAD_PRIORITY 5
|
||||||
|
#define FINSH_THREAD_PRIORITY (RT_THREAD_PRIORITY_MAX / 8 * __FINSH_THREAD_PRIORITY + 1)
|
||||||
|
#define FINSH_THREAD_STACK_SIZE 1024
|
||||||
|
#define FINSH_HISTORY_LINES 5
|
||||||
|
#define FINSH_USING_SYMTAB
|
||||||
|
|
||||||
|
#endif
|
||||||
|
|
||||||
|
|
@ -1 +0,0 @@
|
||||||
|
|
||||||
|
|
@ -1,59 +0,0 @@
|
||||||
#include "config.h"
|
|
||||||
|
|
||||||
mss_uart_instance_t * const gp_my_uart0 = &g_mss_uart0;
|
|
||||||
|
|
||||||
/* gpio and uart0 initialization */
|
|
||||||
void boardInit(void)
|
|
||||||
{
|
|
||||||
/* mss gpio init */
|
|
||||||
MSS_GPIO_init();
|
|
||||||
MSS_GPIO_config(MSS_GPIO_0, MSS_GPIO_OUTPUT_MODE);
|
|
||||||
MSS_GPIO_config(MSS_GPIO_1, MSS_GPIO_OUTPUT_MODE);
|
|
||||||
|
|
||||||
/* mss uart0 init: 115200, 8, no, 1 */
|
|
||||||
MSS_UART_init(gp_my_uart0, MSS_UART_115200_BAUD,
|
|
||||||
MSS_UART_DATA_8_BITS | MSS_UART_NO_PARITY | MSS_UART_ONE_STOP_BIT);
|
|
||||||
}
|
|
||||||
INIT_BOARD_EXPORT(boardInit);
|
|
||||||
|
|
||||||
/* mss uart0 transmit one byte data */
|
|
||||||
void MSS_UART_polled_tx_byte(mss_uart_instance_t *this_uart, const uint8_t byte)
|
|
||||||
{
|
|
||||||
uint32_t tx_ready;
|
|
||||||
do {
|
|
||||||
tx_ready = gp_my_uart0->hw_reg->LSR & 0x20u;
|
|
||||||
} while(!tx_ready);
|
|
||||||
gp_my_uart0->hw_reg->THR = byte;
|
|
||||||
}
|
|
||||||
|
|
||||||
/* docking finish component */
|
|
||||||
void rt_hw_console_output(const char *str)
|
|
||||||
{
|
|
||||||
while(*str != '\0')
|
|
||||||
{
|
|
||||||
if(*str == '\n')
|
|
||||||
MSS_UART_polled_tx_byte(gp_my_uart0, '\r');
|
|
||||||
MSS_UART_polled_tx_byte(gp_my_uart0, *str++);
|
|
||||||
while(!MSS_UART_tx_complete(&g_mss_uart0));
|
|
||||||
}
|
|
||||||
}
|
|
||||||
|
|
||||||
/* docking finish component */
|
|
||||||
char rt_hw_console_getchar(void)
|
|
||||||
{
|
|
||||||
char dat;
|
|
||||||
uint8_t rx_size;
|
|
||||||
do {
|
|
||||||
rx_size = MSS_UART_get_rx(gp_my_uart0, (uint8_t *)&dat, 1);
|
|
||||||
} while(0u == rx_size);
|
|
||||||
return dat;
|
|
||||||
}
|
|
||||||
|
|
||||||
/* custom finish command */
|
|
||||||
extern uint32_t SystemCoreClock;
|
|
||||||
void sayHello(void)
|
|
||||||
{
|
|
||||||
rt_kprintf("Hello RT-Thread! By SmartFusion2 M2S010\r\n");
|
|
||||||
rt_kprintf("MSS System Core Clock: %d\r\n", SystemCoreClock);
|
|
||||||
}
|
|
||||||
MSH_CMD_EXPORT(sayHello, "say hello to console");
|
|
||||||
|
|
@ -1,16 +0,0 @@
|
||||||
#ifndef __INIT_H__
|
|
||||||
#define __INIT_H__
|
|
||||||
|
|
||||||
#include "mss_gpio.h"
|
|
||||||
#include "mss_uart.h"
|
|
||||||
|
|
||||||
#include <rthw.h>
|
|
||||||
#include <rtthread.h>
|
|
||||||
|
|
||||||
void boardInit(void);
|
|
||||||
void MSS_UART_polled_tx_byte(mss_uart_instance_t *this_uart, const uint8_t byte);
|
|
||||||
void rt_hw_console_output(const char *str);
|
|
||||||
char rt_hw_console_getchar(void);
|
|
||||||
void sayHello(void);
|
|
||||||
|
|
||||||
#endif
|
|
||||||
|
|
@ -1,25 +0,0 @@
|
||||||
#include "config.h"
|
|
||||||
#include <rthw.h>
|
|
||||||
#include <rtthread.h>
|
|
||||||
|
|
||||||
#define LED0_PIN MSS_GPIO_0
|
|
||||||
#define LED1_PIN MSS_GPIO_1
|
|
||||||
|
|
||||||
int main(void)
|
|
||||||
{
|
|
||||||
int count = 0;
|
|
||||||
|
|
||||||
while(count++)
|
|
||||||
{
|
|
||||||
MSS_GPIO_set_output(LED0_PIN, 1);
|
|
||||||
MSS_GPIO_set_output(LED1_PIN, 1);
|
|
||||||
rt_thread_mdelay(500);
|
|
||||||
|
|
||||||
MSS_GPIO_set_output(LED0_PIN, 0);
|
|
||||||
MSS_GPIO_set_output(LED1_PIN, 0);
|
|
||||||
rt_thread_mdelay(500);
|
|
||||||
}
|
|
||||||
|
|
||||||
return RT_EOK;
|
|
||||||
}
|
|
||||||
|
|
||||||
|
|
@ -1,160 +0,0 @@
|
||||||
/* RT-Thread config file */
|
|
||||||
|
|
||||||
#ifndef __RTTHREAD_CFG_H__
|
|
||||||
#define __RTTHREAD_CFG_H__
|
|
||||||
|
|
||||||
#if defined(__CC_ARM) || defined(__CLANG_ARM)
|
|
||||||
//#include "RTE_Components.h"
|
|
||||||
|
|
||||||
#define RT_USING_FINSH
|
|
||||||
#if defined(RTE_USING_FINSH)
|
|
||||||
#define RT_USING_FINSH
|
|
||||||
#endif //RTE_USING_FINSH
|
|
||||||
|
|
||||||
#endif //(__CC_ARM) || (__CLANG_ARM)
|
|
||||||
|
|
||||||
// <<< Use Configuration Wizard in Context Menu >>>
|
|
||||||
// <h>Basic Configuration
|
|
||||||
// <o>Maximal level of thread priority <8-256>
|
|
||||||
// <i>Default: 32
|
|
||||||
#define RT_THREAD_PRIORITY_MAX 8
|
|
||||||
// <o>OS tick per second
|
|
||||||
// <i>Default: 1000 (1ms)
|
|
||||||
#define RT_TICK_PER_SECOND 1000
|
|
||||||
// <o>Alignment size for CPU architecture data access
|
|
||||||
// <i>Default: 4
|
|
||||||
#define RT_ALIGN_SIZE 4
|
|
||||||
// <o>the max length of object name<2-16>
|
|
||||||
// <i>Default: 8
|
|
||||||
#define RT_NAME_MAX 8
|
|
||||||
// <c1>Using RT-Thread components initialization
|
|
||||||
// <i>Using RT-Thread components initialization
|
|
||||||
#define RT_USING_COMPONENTS_INIT
|
|
||||||
// </c>
|
|
||||||
|
|
||||||
#define RT_USING_USER_MAIN
|
|
||||||
//#define RT_USING_DEVICE
|
|
||||||
//#define RT_USING_PIN
|
|
||||||
//#define RT_USING_SERIAL
|
|
||||||
//#define RT_CONSOLE_DEVICE_NAME "uart0"
|
|
||||||
//#define RT_CONSOLEBUF_SIZE 128
|
|
||||||
|
|
||||||
// <o>the stack size of main thread<1-4086>
|
|
||||||
// <i>Default: 512
|
|
||||||
#define RT_MAIN_THREAD_STACK_SIZE 512
|
|
||||||
|
|
||||||
// </h>
|
|
||||||
|
|
||||||
// <h>Debug Configuration
|
|
||||||
// <c1>enable kernel debug configuration
|
|
||||||
// <i>Default: enable kernel debug configuration
|
|
||||||
//#define RT_DEBUG
|
|
||||||
// </c>
|
|
||||||
// <o>enable components initialization debug configuration<0-1>
|
|
||||||
// <i>Default: 0
|
|
||||||
#define RT_DEBUG_INIT 0
|
|
||||||
// <c1>thread stack over flow detect
|
|
||||||
// <i> Diable Thread stack over flow detect
|
|
||||||
//#define RT_USING_OVERFLOW_CHECK
|
|
||||||
// </c>
|
|
||||||
// </h>
|
|
||||||
|
|
||||||
// <h>Hook Configuration
|
|
||||||
// <c1>using hook
|
|
||||||
// <i>using hook
|
|
||||||
//#define RT_USING_HOOK
|
|
||||||
// </c>
|
|
||||||
// <c1>using idle hook
|
|
||||||
// <i>using idle hook
|
|
||||||
//#define RT_USING_IDLE_HOOK
|
|
||||||
// </c>
|
|
||||||
// </h>
|
|
||||||
|
|
||||||
// <e>Software timers Configuration
|
|
||||||
// <i> Enables user timers
|
|
||||||
#define RT_USING_TIMER_SOFT 0
|
|
||||||
#if RT_USING_TIMER_SOFT == 0
|
|
||||||
#undef RT_USING_TIMER_SOFT
|
|
||||||
#endif
|
|
||||||
// <o>The priority level of timer thread <0-31>
|
|
||||||
// <i>Default: 4
|
|
||||||
#define RT_TIMER_THREAD_PRIO 4
|
|
||||||
// <o>The stack size of timer thread <0-8192>
|
|
||||||
// <i>Default: 512
|
|
||||||
#define RT_TIMER_THREAD_STACK_SIZE 512
|
|
||||||
// </e>
|
|
||||||
|
|
||||||
// <h>IPC(Inter-process communication) Configuration
|
|
||||||
// <c1>Using Semaphore
|
|
||||||
// <i>Using Semaphore
|
|
||||||
#define RT_USING_SEMAPHORE
|
|
||||||
// </c>
|
|
||||||
// <c1>Using Mutex
|
|
||||||
// <i>Using Mutex
|
|
||||||
#define RT_USING_MUTEX
|
|
||||||
// </c>
|
|
||||||
// <c1>Using Event
|
|
||||||
// <i>Using Event
|
|
||||||
#define RT_USING_EVENT
|
|
||||||
// </c>
|
|
||||||
// <c1>Using MailBox
|
|
||||||
// <i>Using MailBox
|
|
||||||
#define RT_USING_MAILBOX
|
|
||||||
// </c>
|
|
||||||
// <c1>Using Message Queue
|
|
||||||
// <i>Using Message Queue
|
|
||||||
#define RT_USING_MESSAGEQUEUE
|
|
||||||
// </c>
|
|
||||||
// </h>
|
|
||||||
|
|
||||||
// <h>Memory Management Configuration
|
|
||||||
// <c1>Dynamic Heap Management
|
|
||||||
// <i>Dynamic Heap Management
|
|
||||||
#define RT_USING_HEAP
|
|
||||||
// </c>
|
|
||||||
// <c1>using small memory
|
|
||||||
// <i>using small memory
|
|
||||||
#define RT_USING_SMALL_MEM
|
|
||||||
// </c>
|
|
||||||
// <c1>using tiny size of memory
|
|
||||||
// <i>using tiny size of memory
|
|
||||||
//#define RT_USING_TINY_SIZE
|
|
||||||
// </c>
|
|
||||||
// </h>
|
|
||||||
|
|
||||||
// <h>Console Configuration
|
|
||||||
// <c1>Using console
|
|
||||||
// <i>Using console
|
|
||||||
#define RT_USING_CONSOLE
|
|
||||||
// </c>
|
|
||||||
// <o>the buffer size of console <1-1024>
|
|
||||||
// <i>the buffer size of console
|
|
||||||
// <i>Default: 128 (128Byte)
|
|
||||||
#define RT_CONSOLEBUF_SIZE 128
|
|
||||||
// </h>
|
|
||||||
|
|
||||||
#if defined(RT_USING_FINSH)
|
|
||||||
#define FINSH_USING_MSH
|
|
||||||
#define FINSH_USING_MSH_ONLY
|
|
||||||
// <h>Finsh Configuration
|
|
||||||
// <o>the priority of finsh thread <1-7>
|
|
||||||
// <i>the priority of finsh thread
|
|
||||||
// <i>Default: 6
|
|
||||||
#define __FINSH_THREAD_PRIORITY 5
|
|
||||||
#define FINSH_THREAD_PRIORITY (RT_THREAD_PRIORITY_MAX / 8 * __FINSH_THREAD_PRIORITY + 1)
|
|
||||||
// <o>the stack of finsh thread <1-4096>
|
|
||||||
// <i>the stack of finsh thread
|
|
||||||
// <i>Default: 4096 (4096Byte)
|
|
||||||
#define FINSH_THREAD_STACK_SIZE 1024
|
|
||||||
// <o>the history lines of finsh thread <1-32>
|
|
||||||
// <i>the history lines of finsh thread
|
|
||||||
// <i>Default: 5
|
|
||||||
#define FINSH_HISTORY_LINES 5
|
|
||||||
|
|
||||||
#define FINSH_USING_SYMTAB
|
|
||||||
// </h>
|
|
||||||
#endif
|
|
||||||
|
|
||||||
// <<< end of configuration section >>>
|
|
||||||
|
|
||||||
#endif
|
|
||||||