10 KiB
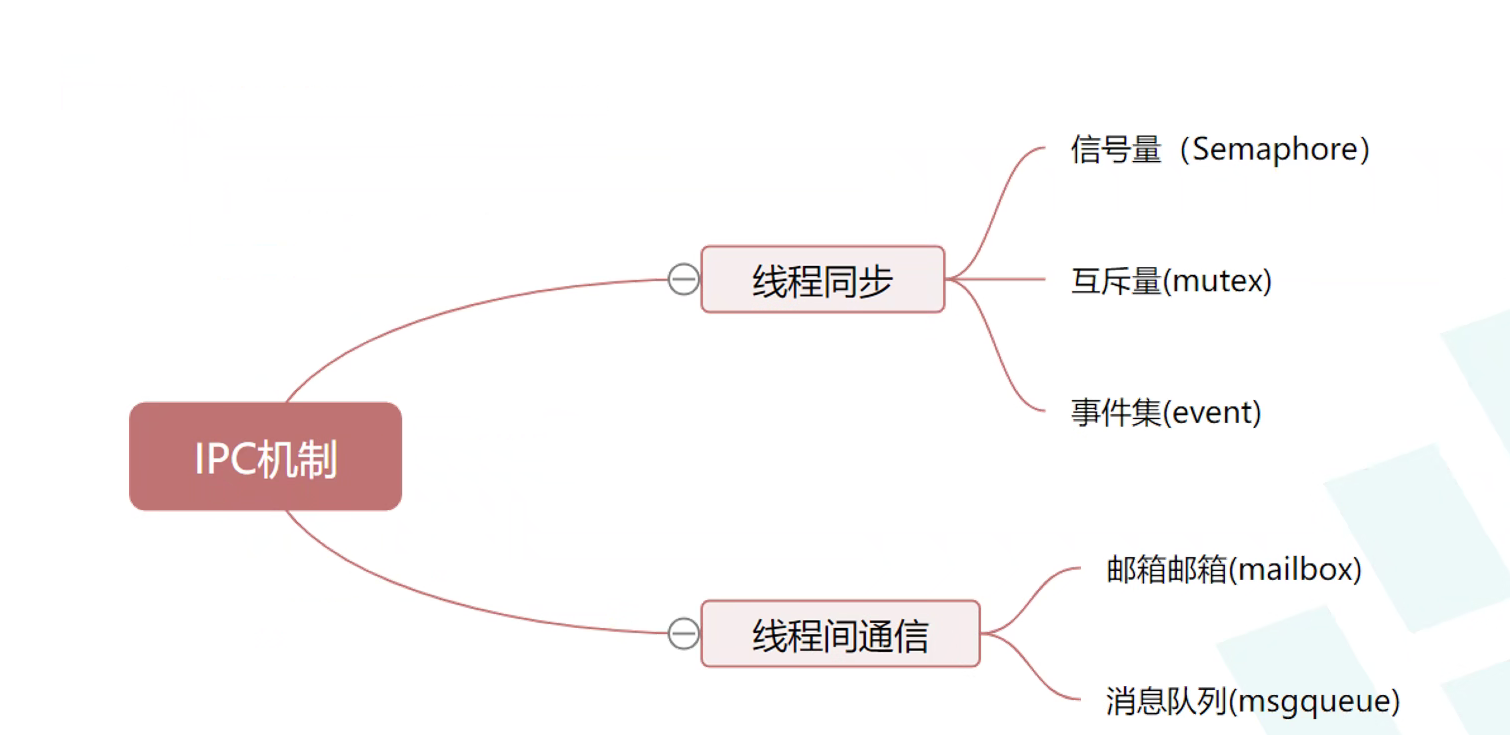
Day 3 IPC机制
同步是指按预定的先后次序进行运行
- √
- 互斥量
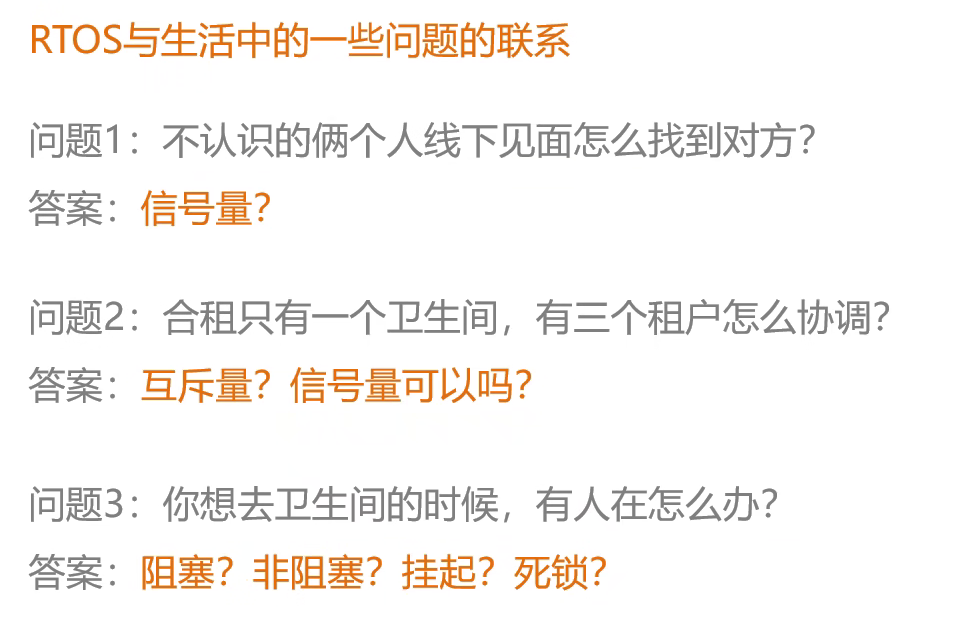
- 挂起:先做其它 死锁:互相等待……
临界区
only one can use the resource at a time
有人用了,别人就不能用
阻塞非阻塞
Blocking/Non-blocking 线程阻塞:资源被其它线程占用 阻塞式线程:只能执行当前任务并等待其完成 非阻塞式线程:执行当前任务,还可以做其它事情,完成时收到异步通知
挂起
暂时搁置
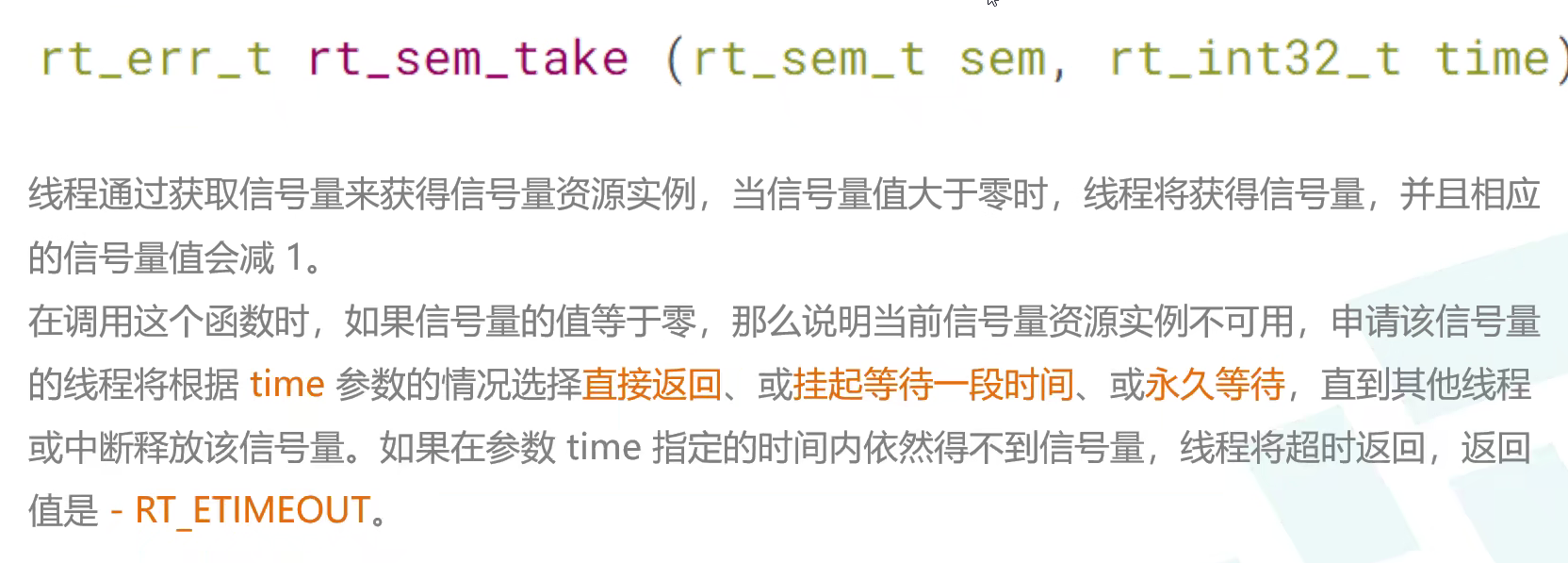
当信号量实例数目为零时,再申请该信号量的线程就会被挂起在该信号量的等待队列上,等待可用的信号量实例(资源)。
把寄存器,线程栈里面的东西保存下来
死锁
两个线程互相等待,需要对方的资源
信号量
约等于停车场剩余车位 用于线程间同步、互斥
- 有线程释放,信号量+1;有线程获得,信号量-1
- 二值信号量 约等于bool 初始为0,解决同步问题
- 计数信号量 初始为期待的值(允许同时访问同一资源的任务个数),用于解决资源计数问题
- 裸机 根据全局变量flag 反应(不知道谁修改→错误、逻辑混乱、破坏、不能挂起一直停在这……)
- 用系统的api,不要flag
- 三种反应:一直等,等一会,不等
信号量控制块由结构体 struct rt_semaphore 表示。另外一种 C 表达方式 rt_sem_t
static rt_sem_t dynamic_sem = RT_NULL;
api
√ 创建信号量(动态)节省资源,动态分配,可能内存破坏
从对象管理器中分配一个semaphore对象,…… 当信号量不可用时的线程排队方式flag:RT_IPC_FLAG_FIFO先进先出/RT_IPC_FLAG_PRIO优先级 注意区别?
rt_sem_t rt_sem_create(const char* name, rt_uint32_t value, rt_uint8_t flag);
√ 删除信号量(动态)
(适用于动态创建的信号量) 删除信号量以释放系统资源。如果删除该信号量时,有线程正在等待该信号量,那么删除操作会先唤醒等待在该信号量上的线程(等待线程的返回值是 - RT_ERROR),然后再释放信号量的内存资源
rt_err_t rt_sem_delete(rt_sem_t sem);
初始化信号量(静态)还在内存,不用了别人也用不了
rt_err_t rt_sem_init(rt_sem_t sem, const char* name, rt_uint32_t value, rt_uint8_t flag);
脱离信号量
从内核对象管理器中脱离 ,原来挂起在信号量上的等待线程将获得 - RT_ERROR 的返回值
rt_err_t rt_sem_detach(rt_sem_t sem);
获取信号量
time 单位tick/RT_WAITING_FOREVER
RT_EOK:成功获得信号量 -RT_ETIMEOUT:超时依然未获得信号量 -RT_ERROR:其他错误
rt_err_t rt_sem_take(rt_sem_t sem, rt_int32_t time);
无等待获取信号量
rt_err_t rt_sem_trytake(rt_sem_t sem);
释放信号量
rt_err_t rt_sem_release(rt_sem_t sem);
互斥量(互斥锁)
约等于仅有的一把钥匙 保护临界资源
- 互斥量所用权
- 防止优先级反转
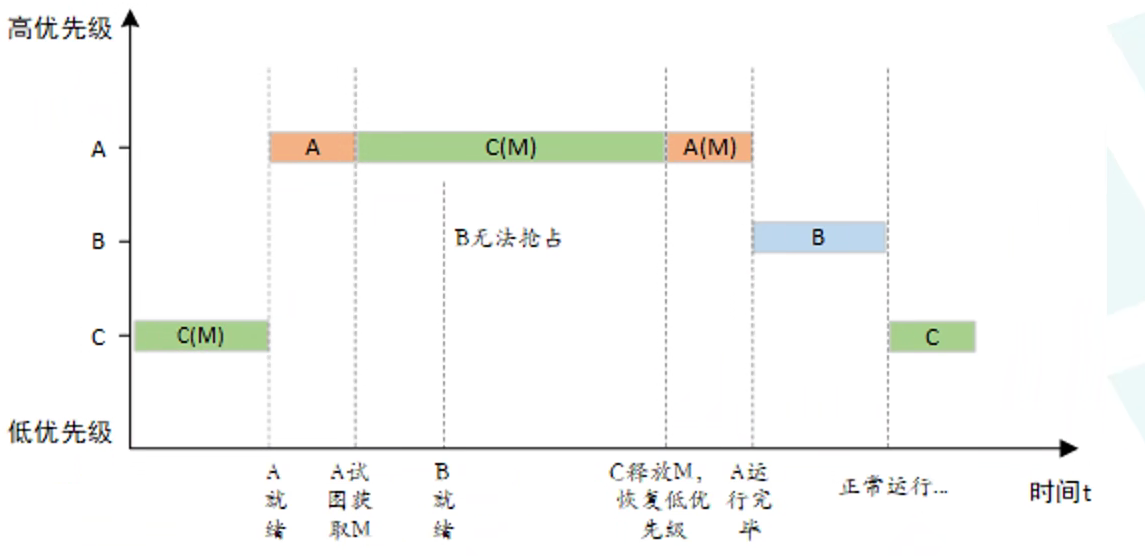
优先级反转
高优先级被低优先级阻塞
实时:高优先级先执行
运行需要资源
资源有信号量
临界资源有互斥量
占用资源要先完成才能释放
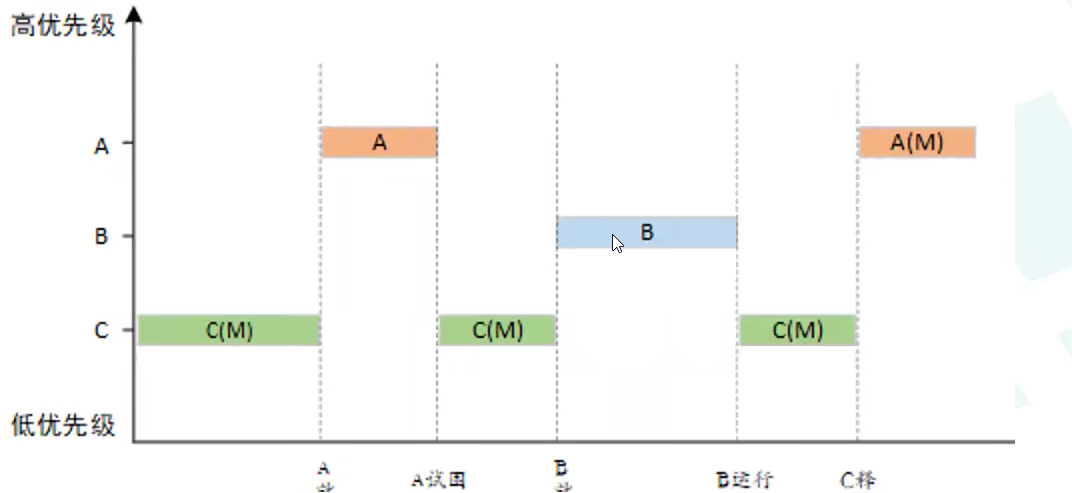 把A的优先级临时赋C
把A的优先级临时赋C
创建和删除互斥量
无论选择 RT_IPC_FLAG_PRIO 还是 RT_IPC_FLAG_FIFO,内核均按照 RT_IPC_FLAG_PRIO 处理
rt_mutex_t rt_mutex_create (const char* name, rt_uint8_t flag);
rt_err_t rt_mutex_delete (rt_mutex_t mutex);
初始化和脱离互斥量
rt_err_t rt_mutex_init (rt_mutex_t mutex, const char* name, rt_uint8_t flag);
rt_err_t rt_mutex_detach (rt_mutex_t mutex);
获取互斥量
如果互斥量已经被当前线程控制,在当前线程再一次获取,那么该互斥量的持有计数+1,当前线程不会挂起
rt_err_t rt_mutex_take (rt_mutex_t mutex, rt_int32_t time);
无等待获取互斥量
rt_err_t rt_mutex_trytake(rt_mutex_t mutex);
释放互斥量
信号量:谁都可以获取,谁都可以释放 互斥量:只有拥有互斥量控制权的线程才可以释放,每释放一次,持有计数-1,当持有计数为0时,才变为可用
rt_err_t rt_mutex_release (rt_mutex_t mutex);
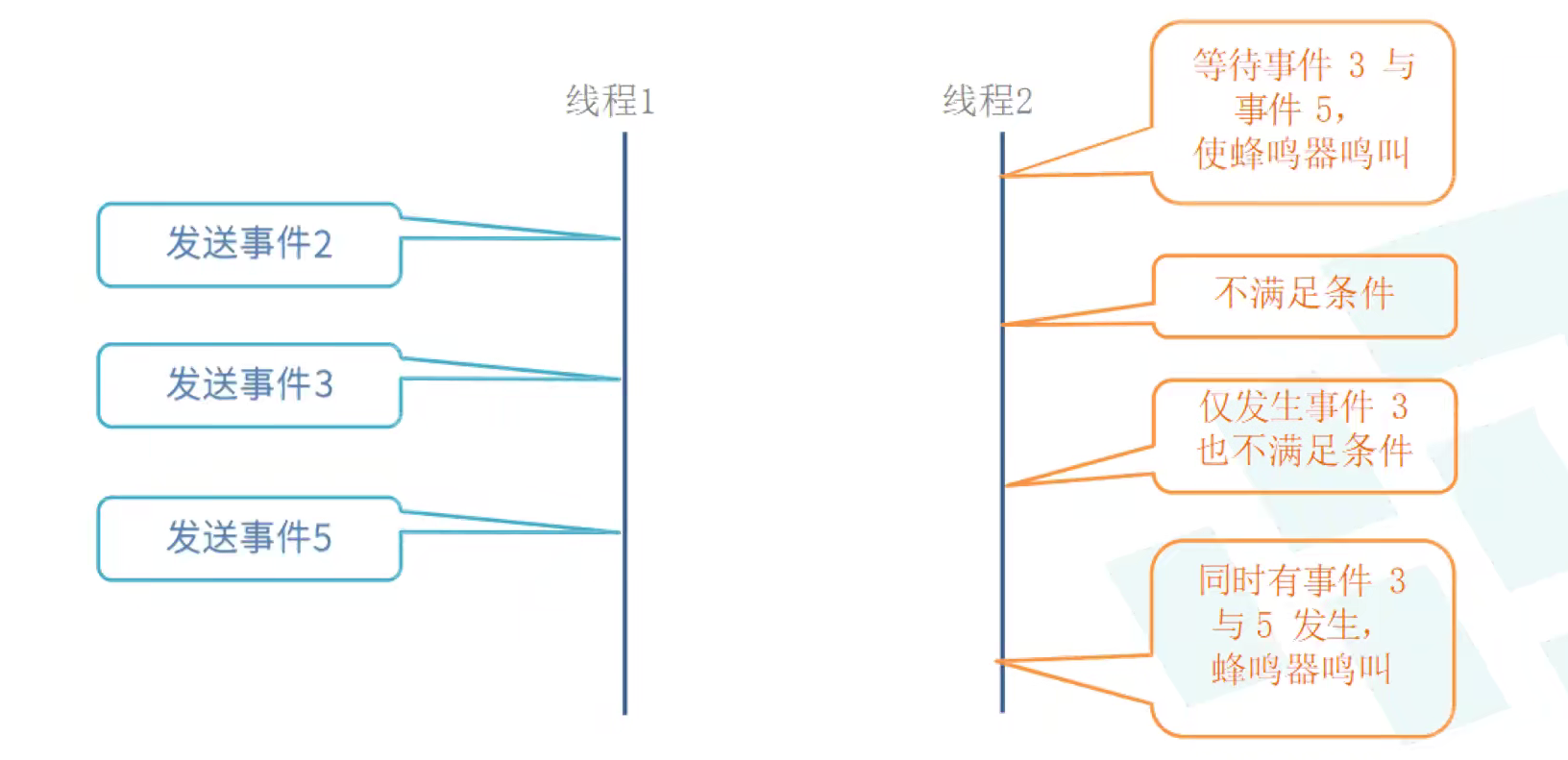
事件集
一堆事件在32bit中(32个事件0/1),在线程中与,或判断执行
- 发送: 从中断/线程中
- 接收: 线程接收,条件检查
创建事件集
rt_event_t rt_event_create(const char* name, rt_uint8_t flag);
删除事件集
删除前唤醒所有挂起在该事件集上的线程,返回-RT_ERROR
create用这个
rt_err_t rt_event_delete(rt_event_t event);
初始化事件集
静态事件集对象的内存一般放于读写数据段或未初始化数据段中
rt_err_t rt_event_init(rt_event_t event, const char* name, rt_uint8_t flag);
脱离事件集
create 不能用
rt_err_t rt_event_detach(rt_event_t event);
发送事件集
set 即我们要发送的(1<<n)
rt_err_t rt_event_send(rt_event_t event, rt_uint32_t set);
接收事件集
set :当前目标需要的事件 option : RT_EVENT_FLAG_OR RT_EVENT_FLAG_AND recved : 接收到刚发送的事件
rt_err_t rt_event_recv(rt_event_t event,
rt_uint32_t set,
rt_uint8_t option,
rt_int32_t timeout,
rt_uint32_t* recved);
(消息)邮箱
也叫交换信息
4个字节(32位)恰好可以传递指针
创建邮箱
这块内存的大小等于邮件大小(4 字节)与邮箱容量(size)的乘积
rt_mailbox_t rt_mb_create(const char* name, rt_uint32_t size, rt_uint8_t flag);
删除邮箱
rt_err_t rt_mb_delete(rt_mailbox_t mb);
初始化邮箱
rt_err_t rt_mb_init(rt_mailbox_t mb,
const char* name,
void* msgpool,
rt_size_t size,
rt_uint8_t flag)
发送邮件
rt_err_t rt_mb_send (rt_mailbox_t mb, rt_uint32_t value);
等待方式发送
邮箱满了可以等待一段时间,不能在中断中使用
接收邮件
地址存到val ue
rt_err_t rt_mb_recv (rt_mailbox_t mb, rt_uint32_t* value, rt_int32_t timeout);
...
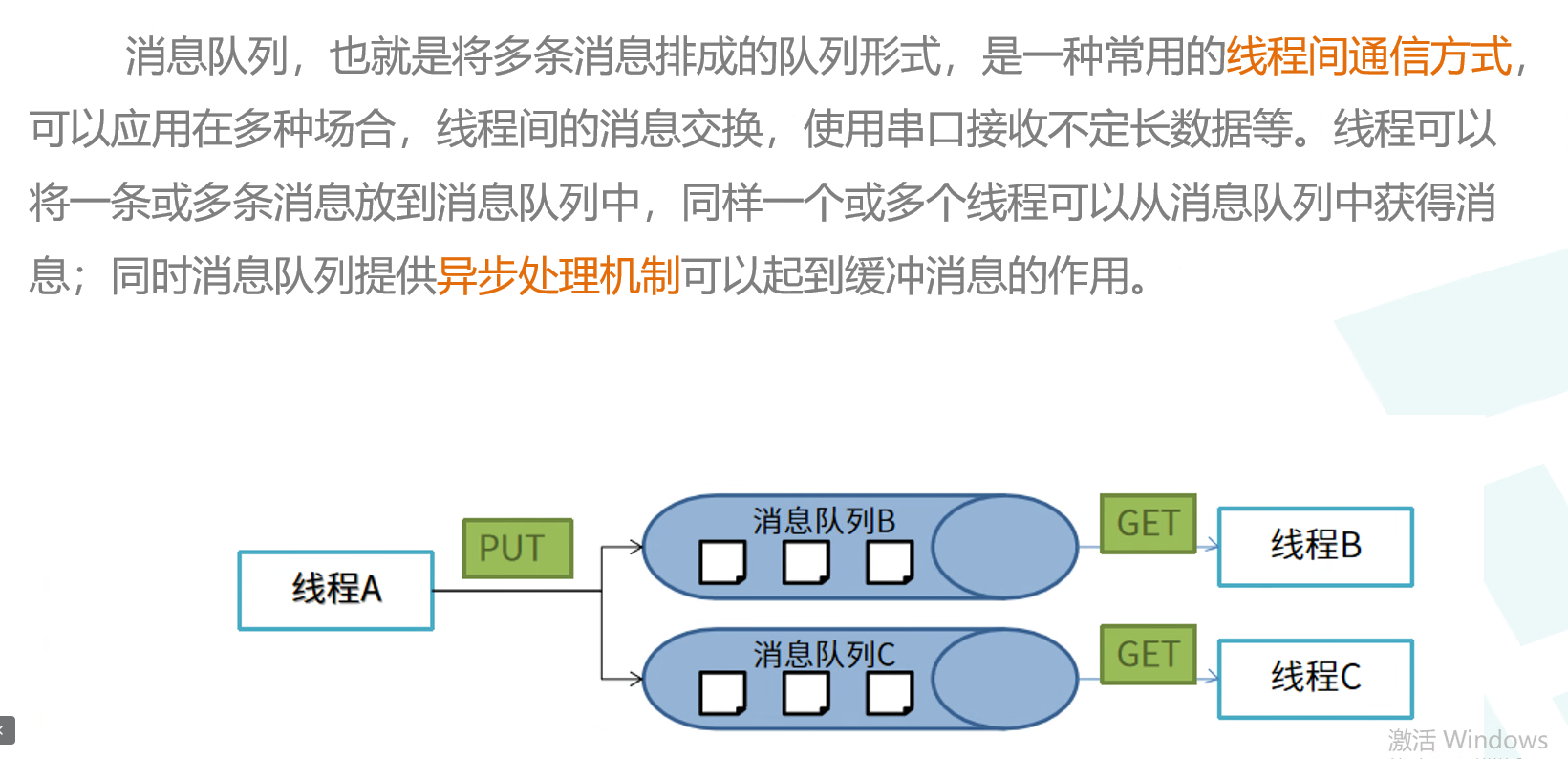
消息队列
异步通信
超时机制即timeout
 FIFO :线程先得到先进入消息队列的消息
RT_IPC_FLAG_FIFO 或 RT_IPC_FLAG_PRIO :哪个线程先
FIFO :线程先得到先进入消息队列的消息
RT_IPC_FLAG_FIFO 或 RT_IPC_FLAG_PRIO :哪个线程先
创建消息队列
区别:rt_size_t msg_size, rt_size_t max_msgs,
rt_mq_t rt_mq_create(const char* name,
rt_size_t msg_size,
rt_size_t max_msgs,
rt_uint8_t flag);

发送
中断里面不可以用rt_mq_send_wait
rt_err_t rt_mq_send (rt_mq_t mq, void* buffer, rt_size_t size);
IPC示例
 示例代码在这里
一个好用的串口工具类似mobaxterm
示例代码在这里
一个好用的串口工具类似mobaxterm
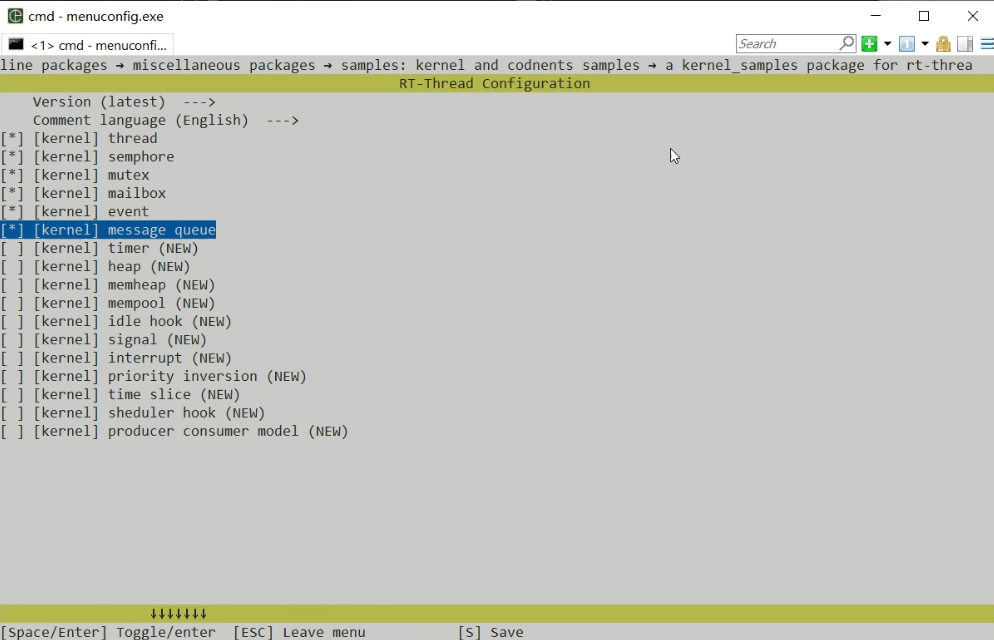
配置完任何软件包都要在env中
pkgs --update
按键灭灯实践
灭了怎么点都不亮
因为按键按灭就没再点亮 在key线程循环开始每次点亮?
灯轻微闪烁,几乎看不出
不能及时获取?用无等待获取信号量?
还是一样……
因为采用了延时防止误触,判断是否按下按键花了一点时间
只要知道按键没有按下就亮灯就行
在下次判断按键没按下之后再亮灯
居然在按键的线程在控制led
改为没摁才释放信号量,led线程获取到后设为亮灯 并在获取信号量前将led设为灭灯
#include <board.h>
#include <rtthread.h>
#include <drv_gpio.h>
#ifndef RT_USING_NANO
#include <rtdevice.h>
#endif /* RT_USING_NANO */
#define GPIO_LED_B GET_PIN(F, 11)
#define GPIO_LED_R GET_PIN(F, 12)
#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 1024
#define THREAD_TIMESLICE 5
#define PIN_KEY0 GET_PIN(C,0)
static rt_thread_t tid1 = RT_NULL;
static rt_thread_t tid2 = RT_NULL;
static void key_name_entry(void *parameter);
static void led_name_entry(void *parameter);
static rt_sem_t dynamic_sem = RT_NULL;
int main(void)
{
rt_pin_mode(GPIO_LED_R, PIN_MODE_OUTPUT);
rt_pin_mode(PIN_KEY0, PIN_MODE_INPUT_PULLUP);
dynamic_sem = rt_sem_create("dsem", 0, RT_IPC_FLAG_PRIO);
if (dynamic_sem == RT_NULL)
{
rt_kprintf("create dynamic semaphore failed.\n");
return -1;
}
else
{
rt_kprintf("create done. dynamic semaphore value = 0.\n");
}
tid1 = rt_thread_create("key_thread",
key_name_entry, RT_NULL,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
if (tid1 != RT_NULL)
{
rt_thread_startup(tid1);
}
tid2 = rt_thread_create("led_thread",
led_name_entry, RT_NULL,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
if (tid2 != RT_NULL)
{
rt_thread_startup(tid2);
}
// while (1)
// {
// rt_pin_write(GPIO_LED_R, PIN_HIGH);
// rt_thread_mdelay(500);
// rt_pin_write(GPIO_LED_R, PIN_LOW);
// rt_thread_mdelay(500);
// }
}
static void key_name_entry(void *parameter)
{
rt_uint32_t count=0;
while (1)
{
if(rt_pin_read(PIN_KEY0) == PIN_LOW)
{
rt_thread_mdelay(100);
if(rt_pin_read(PIN_KEY0) == PIN_LOW)
{
rt_kprintf("key0 is pressed (%d) ", count++);
// rt_sem_release(dynamic_sem);
}
else
{
rt_sem_release(dynamic_sem);
}
}
else
{
rt_sem_release(dynamic_sem);
}
rt_thread_mdelay(10);
}
}
static void led_name_entry(void *parameter)
{
rt_uint32_t count=0;
rt_uint32_t result=0;
while (1)
{
rt_pin_write(GPIO_LED_R, PIN_HIGH);
result = rt_sem_take(dynamic_sem, RT_WAITING_FOREVER);
if (result == RT_EOK)
{
// rt_kprintf("LED LOW\n");
rt_pin_write(GPIO_LED_R, PIN_LOW);
}
rt_thread_mdelay(10);
}
}