{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
设备驱动
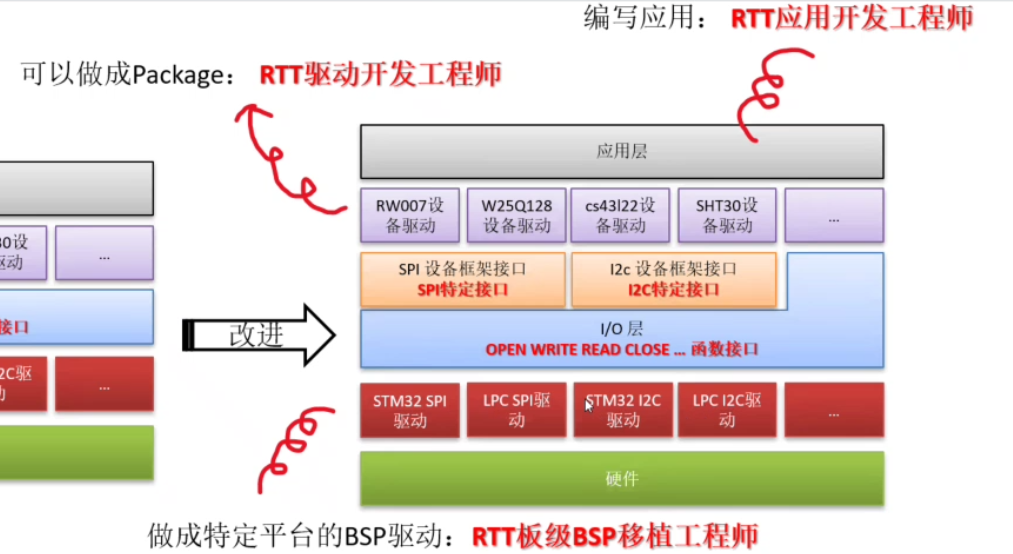
I/O设备框架概念
SPI驱动和设备驱动分离,提供统一的API:
• 更换 MCU 只需要改变对应的对接驱动
• 重新驱动设备,只需要重新编写设备驱动相关的代码
• 同一 API 接口,学习成本低
• 分离后设备驱动可以入库,供公司其他项目使用,减少碎片化开发,防止反复造轮子
• 代码框架会变复杂,但是从上面的优点来看是值得的

I/O框架
I/O设备:显示屏、串口通信、flash、SD卡、以太网接口……
接口:open,close...
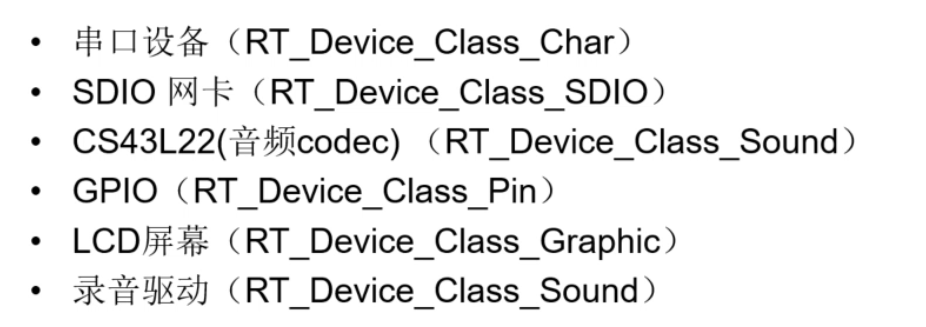
派生设备种类
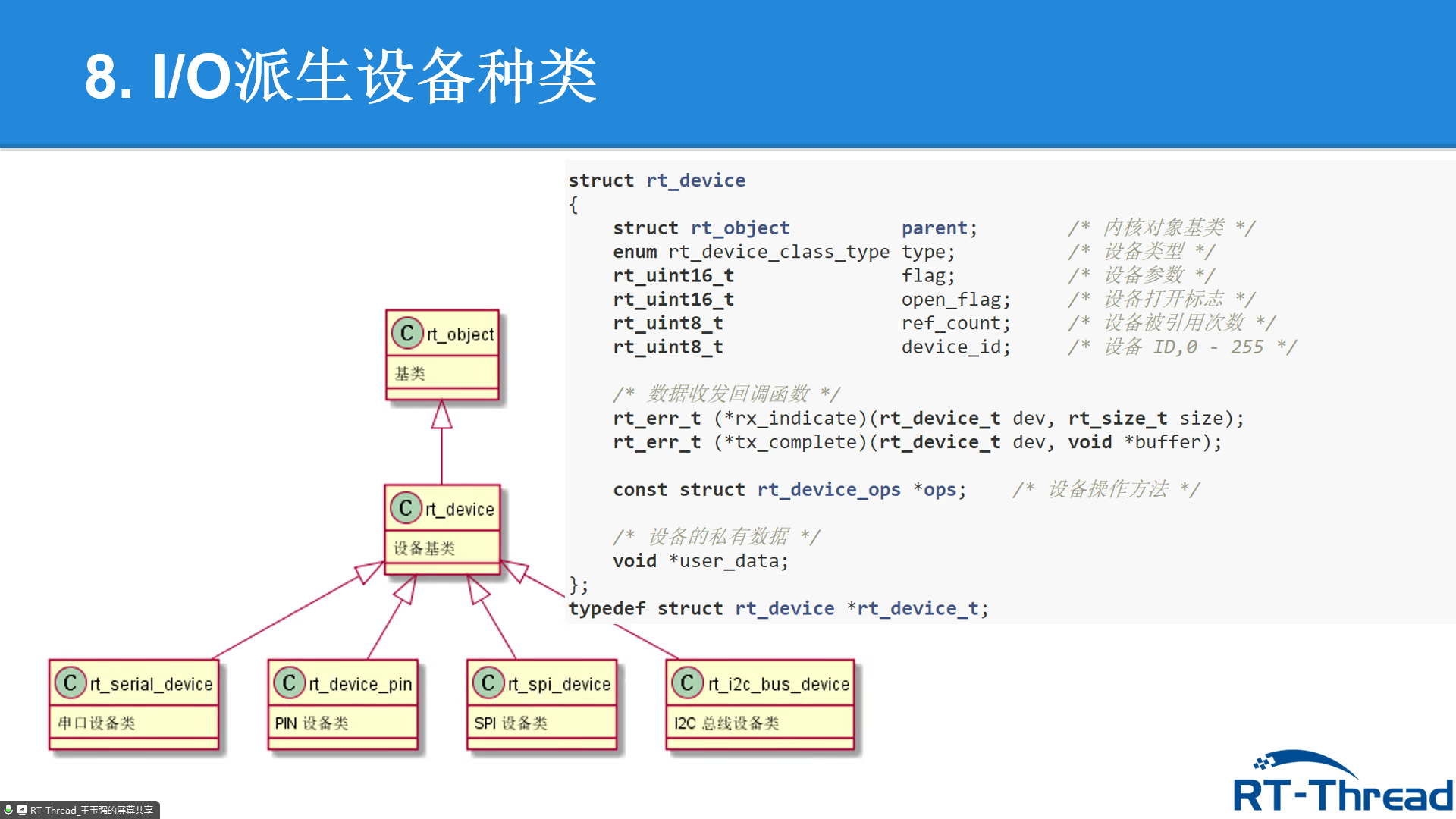
RT_Device_Class_Char /* 字符设备 */
RT_Device_Class_Block /* 块设备 */
RT_Device_Class_NetIf /* 网络接口设备 */
RT_Device_Class_MTD /* 内存设备 */
RT_Device_Class_RTC /* RTC 设备 */
RT_Device_Class_Sound /* 声音设备 */
RT_Device_Class_Graphic /* 图形设备 */
RT_Device_Class_I2CBUS /* I2C 总线设备 */
RT_Device_Class_USBDevice /* USB device 设备 */
RT_Device_Class_USBHost /* USB host 设备 */
RT_Device_Class_SPIBUS /* SPI 总线设备 */
RT_Device_Class_SPIDevice /* SPI 设备 */
RT_Device_Class_SDIO /* SDIO 设备 */
RT_Device_Class_Miscellaneous /* 杂类设备 */
字符设备、块设备
字符设备
顺序读取:键盘、串口
块设备
随机读取:硬盘、SD卡、NAND FLASH
为什么分类设备
一类的控制相同
例子
api
创建销毁设备
注册销毁
flags
……_stream :向串口终端输出字符串
\n → \r\n
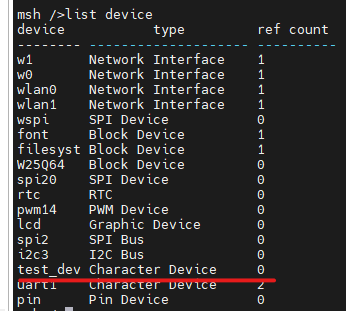
实验1:注册字符设备
#include <rtthread.h>
#include <rtdevice.h>
static int rt_device_test_init(void)
{
rt_device_t test_dev = rt_device_create(RT_Device_Class_Char,0);
if(!test_dev)
{
rt_kprintf("test_dev create failed\n");
return -RT_ERROR;
}
if(rt_device_register(test_dev,"test_dev",RT_DEVICE_FLAG_RDWR)!=RT_EOK)
{
rt_kprintf("test_dev register failed\n");
}
return RT_EOK;
}
MSH_CMD_EXPORT_ALIAS(rt_device_test_init,devtest, test device init);
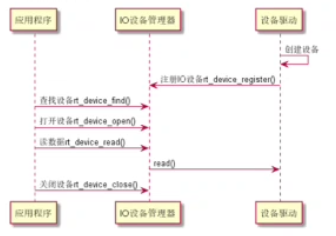
访问设备
open,close...
……
调用关系图
IO设备管理层 PIN设备驱动框架层 PIN设备驱动层
PIN设备
GPIO
芯片上的引脚分为 4 类:电源、时钟、控制、I/O I/O 口使用模式:
- GPIO(General Purpose Input Output(通用输入 / 输出)),
- 功能复用I/O(如 SPI/I2C/UART 等)
可编程控制中断
常用接口
- rt_pin_mode()
- rt_pin_write()
- rt_pin_read()
- rt_pin_attach_irq() :绑定引脚中断回调函数
- rt_pin_irq_enable() :使能引脚中断
- rt_pin_detach_irq() :脱离引脚中断回调函数
……
 Assert()断言:判断是否为真,假则报错,终止运行
Assert()断言:判断是否为真,假则报错,终止运行
实验:外部中断
LOG 不用\n
#include <drv_gpio.h>
#include <rtdevice.h>
#include <rtthread.h>
#define LOG_TAG "pin.irq"
#define LOG_LVL LOG_LVL_DBG
#include <ulog.h>
#define KEY_UP GET_PIN(C, 5)
#define KEY_DOWN GET_PIN(C, 1)
#define KEY_LEFT GET_PIN(C, 0)
#define KEY_RIGHT GET_PIN(C, 4)
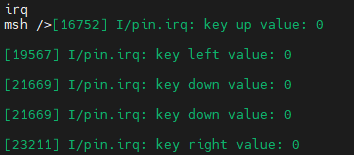
void key_up_callback(void *args)
{
int value = rt_pin_read(KEY_UP);
LOG_I("key up value: %d\n", value);
}
void key_down_callback(void *args)
{
int value = rt_pin_read(KEY_DOWN);
LOG_I("key down value: %d\n", value);
}
void key_left_callback(void *args)
{
int value = rt_pin_read(KEY_LEFT);
LOG_I("key left value: %d\n", value);
}
void key_right_callback(void *args)
{
int value = rt_pin_read(KEY_RIGHT);
LOG_I("key right value: %d\n", value);
}
static int rt_pin_irq_example(void)
{
rt_pin_mode(KEY_UP, PIN_MODE_INPUT_PULLUP);
rt_pin_mode(KEY_DOWN, PIN_MODE_INPUT_PULLUP);
rt_pin_mode(KEY_LEFT, PIN_MODE_INPUT_PULLUP);
rt_pin_mode(KEY_RIGHT, PIN_MODE_INPUT_PULLUP);
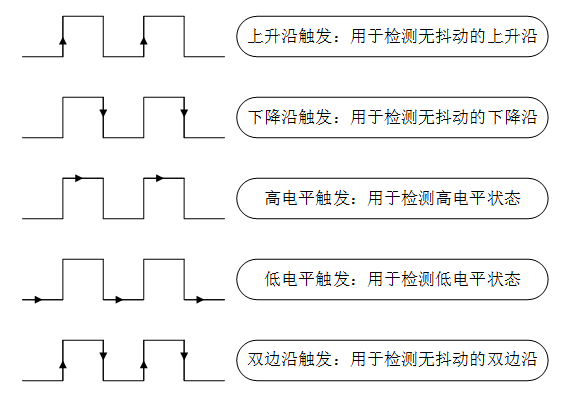
rt_pin_attach_irq(KEY_UP, PIN_IRQ_MODE_FALLING, key_up_callback, RT_NULL);
rt_pin_attach_irq(KEY_DOWN, PIN_IRQ_MODE_FALLING, key_down_callback, RT_NULL);
rt_pin_attach_irq(KEY_LEFT, PIN_IRQ_MODE_FALLING, key_left_callback, RT_NULL);
rt_pin_attach_irq(KEY_RIGHT, PIN_IRQ_MODE_FALLING, key_right_callback, RT_NULL);
rt_pin_irq_enable(KEY_UP,PIN_IRQ_ENABLE);
rt_pin_irq_enable(KEY_DOWN,PIN_IRQ_ENABLE);
rt_pin_irq_enable(KEY_LEFT,PIN_IRQ_ENABLE);
rt_pin_irq_enable(KEY_RIGHT,PIN_IRQ_ENABLE);
return RT_EOK;
}
MSH_CMD_EXPORT_ALIAS(rt_pin_irq_example,irq, pin_irq_example);
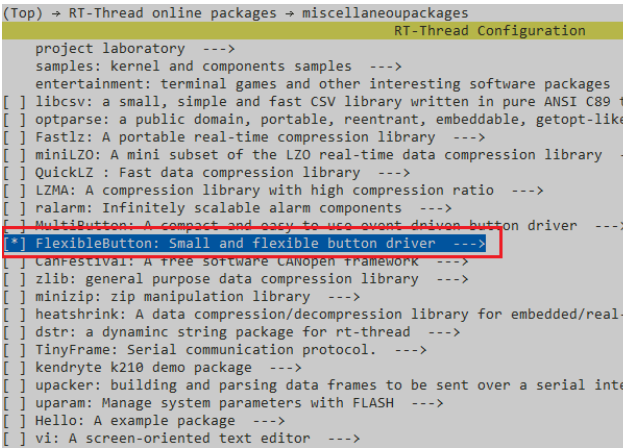
FlexibleButton 按键库(可用)
I2C总线
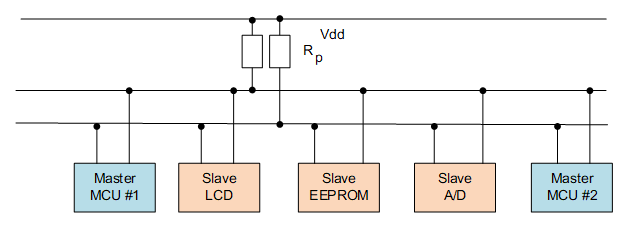
官方文档链接 I2C 是 Inter-Integrated Circuit 的简称,读作:I-squared-C I2C 总线传输数据时只需两根信号线,一根是双向数据线 SDA(serial data),另一根是双向时钟线 SCL(serial clock)。SPI 总线有两根线分别用于主从设备之间接收数据和发送数据,而 I2C 总线只使用一根线进行数据收发。不同于 SPI 一主多从的结构,它允许同时有多个主设备存在 RTT用GPIO模拟I2C
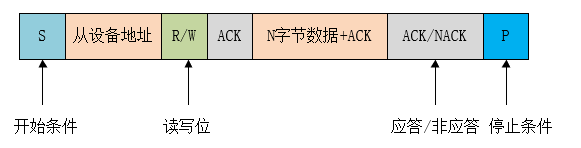
 应答信号: 每传输完成一个字节的数据,接收方就需要回复一个 ACK(acknowledge)。写数据时由从机发送 ACK,读数据时由主机发送 ACK。当主机读到最后一个字节数据时,可发送 NACK(Not acknowledge)然后跟停止条件。
应答信号: 每传输完成一个字节的数据,接收方就需要回复一个 ACK(acknowledge)。写数据时由从机发送 ACK,读数据时由主机发送 ACK。当主机读到最后一个字节数据时,可发送 NACK(Not acknowledge)然后跟停止条件。
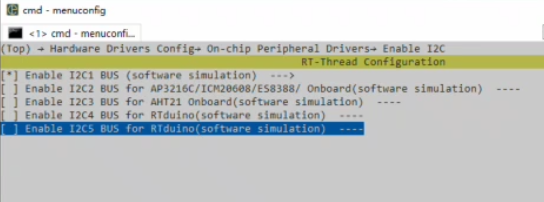 手动添加
Kconfig → drv_soft_i2c.c&h
list device 查看
六轴***:
手动添加
Kconfig → drv_soft_i2c.c&h
list device 查看
六轴***:
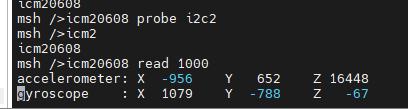 可尝试i2c-tools 软件包
可尝试i2c-tools 软件包